Paso 2: Instalar el puente en H
Puentes de H son un gran componente a utilizar al construir los coches autónomos. Un puente H nos permite aplicar un voltaje a través de una carga en cualquier dirección, lo que significa nos da la capacidad para ejecutar el DC motores de nuestros coches ambos hacia delante y hacia atrás, lo que nos permite cambiar la dirección de nuestro coche está viajando sin hacerlo girar en un círculo completo (es decir: simplemente podemos conducir remite o mueva hacia atrás).
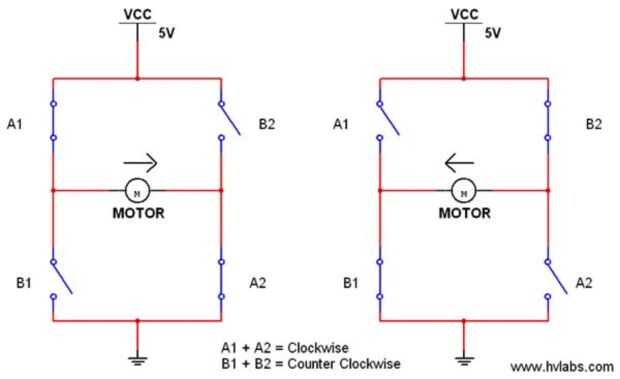
Antes de que realmente utilizamos el puente H, vamos a familiarizarse con cómo exactamente funcionan. Puentes de H tienen cuatro interruptores, dos de un lado paralelo a dos en el otro lado. En medio de estos cuatro interruptores paralelos es nuestro motor, conectando los dos lados. Cuando queremos aplicar la tensión unidireccional, cerramos la parte superior izquierda e inferior derecha y abrir los interruptores izquierdos superior derecho e inferior, que permite que la tensión aplicada en sentido horario. Por el contrario, si queremos aplicar una tensión hacia la izquierda, debemos abrir los interruptores de derecha superior izquierda e inferior y luego cierre los interruptores izquierdos derecha y de abajo arriba. A continuación hay un diagrama que demuestra cómo un puente H realmente permite voltaje a aplicar en dos direcciones diferentes:
(Ver tercera foto)
http://www.hvlabs.com/hbridge.html
Por lo tanto, para aplicar tensión hacia la derecha, cerramos los interruptores A1 y A2 (y abierto los interruptores B1 y B2). Para aplicar una tensión en sentido antihorario, cerramos los interruptores B1 y B2 (e interruptores abiertos A1 y A1).
Ahora vamos a hablar de cómo enlazar el puente H hasta nuestro Arduino y el coche por lo que podemos conseguir nuestra coche en movimiento. Primero, vamos a asegurarnos de que tenemos la parte derecha. El puente H que utilizamos en nuestro coche se ve así (número de modelo: SN754410):
(Ver segunda foto)
http://www.hobbytronics.co.uk/h-Bridge-driver-sn75...
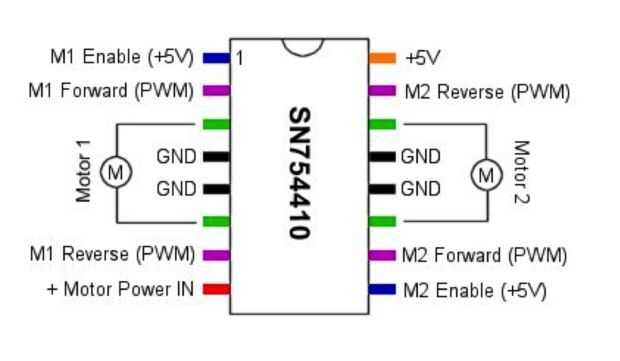
Cuando pones tu puente H en su protoboard, tome nota de qué lado que impresión pequeña, en forma de u. Como puede ver tanto la foto de arriba y más claramente en el diagrama de los pines, el lado con esa hierba es la parte superior del dispositivo. Ahora, vamos a pasar a hablar acerca de cómo conectar realmente el puente en H. A continuación es un esquema detallado con el pin del puente H se utilizó:
(Ver la primera foto)
http://www.hobbytronics.co.uk/h-Bridge-driver-sn75...
Los pines se numeran tal que 1 está en la parte superior izquierda, 8 está en la parte inferior izquierda, 9 está en la parte inferior derecha y 16 está en la parte superior derecha. Cuando usted se lo montan el puente H a tu Arduino, vas a querer tomar nota de que los pernos en el puente de H corresponden a que alfileres le Arduino así que usted puede escribir su código con éxito. A continuación es nuestro código, y podemos explicar cómo declaramos que pernos correspondieron a que en nuestro código:
Declarar pines que permiten el manejo y conducción hacia delante
y al revés
driveEn int = 8; habilitar el motor de la unidad
int driveFor = 3; motor de accionamiento hacia adelante
int driveRev = 9; motor de accionamiento inverso
int turnen del verano = 4; habilitar el motor de giro
turnRight int = 11; motor de giro derecha
int izquierda = 6; Girar motor izquierda
-Este código refleja lo siguiente:
o conectamos el Pin 1 en el puente de H a 8 Pin en nuestro Arduino
§ Esto permitirá el primer motor
o conectamos Pin 7 en el puente de H a 3 Pin en nuestro Arduino (nota que en el Arduino del Pin 3 es un PWM que permitió controlar el voltaje suministrado, pero sólo puede conectarlo a un pin digital para voltaje constante)
§ Una alta activación permite el coche impulsar
o nos conectar Pin 2 en el puente H al Pin 9 en nuestro Arduino (nota que Pin 9 del Arduino es un PWM que permitió controlar el voltaje suministrado, pero sólo puede conectarlo a un pin digital para voltaje constante)
§ Una alta activación permitirá el coche a conducir al revés
o conectamos Pin 9 en el puente H al Pin 4 en el Arduino
§ Una alta activación permite el coche activar
o nos conectar Pin 15 en el puente H al Pin 11 en el Arduino
§ Una alta activación permitirá que el coche gire a la derecha
o nos conectar Pin 10 en el puente H al Pin 6 en el Arduino
§ Una alta activación permitirá que el coche gire a la izquierda
Establece todos los pines en el modo de entrada o de salida (por consiguiente)
void setup() {}
pinMode (driveEn, salida);
pinMode (driveFor, salida);
pinMode (driveRev, salida);
pinMode (turnen del verano, salida);
pinMode (turnRight, salida);
pinMode (izquierda, salida);
v aquí, hay que declarar todos los pines arriba como salidas
Método para hacer el coche coche remite
void goForwards() {}
digitalWrite (driveEn, HIGH); permite que el motor de accionamiento
digitalWrite (driveRev, bajo); se asegura de que el motor no gira inverso
digitalWrite (driveFor, HIGH); motor de la unidad presentada
retorno;
}
v establece la driveEn y driveFor pernos sobre una activación alta y el pin de driveRev en un bajo (desactivar) para mover hacia delante el coche
Método para hacer que el coche deje de
void goStop() {}
digitalWrite (driveEn, LOW); deshabilita el motor adecuado
digitalWrite (driveRev, bajo); deshabilita el motor izquierdo
digitalWrite (driveFor, bajo); se asegura de que el motor no gira inverso
digitalWrite (turnen del verano, LOW); deshabilita el motor de giro
digitalWrite (turnRight, LOW); se asegura de que el motor no gire a la derecho
digitalWrite (izquierda, LOW); se asegura de que el motor no gire a la izquierda
retorno;
}
-Poner todos los pines para bajo (desactivar) para hacer que el coche se detenga completamente
Método para hacer el coche hacia atrás/en reversa
void goBackwards() {}
digitalWrite (driveEn, HIGH); permite que el motor de accionamiento
digitalWrite (driveFor, bajo); se asegura de que el motor no gira hacia adelante
digitalWrite (driveRev, HIGH); poner el motor de la unidad hacia atrás
retorno;
}
-Pernos driveEn y driveRev set para permitir alta y el pin driveFor a baja activar (desactivar) para permitir que el coche a conducir al revés
Método para hacer que el coche gire a la derecha
void goRight() {}
digitalWrite (turnen del verano, HIGH); permite que el motor gire a
digitalWrite (izquierda, LOW); se cerciora de que no rotar el motor de giro a la izquierda
digitalWrite (turnRight, HIGH); gira el motor de giro derecha
retorno;
}
-Set pins turnen del verano y turnRight activar alta y el pin de la izquierda a baja activar (desactivar) para permitir que el coche gire a la derecha
Método para hacer que el coche gire a la izquierda
void goLeft() {}
digitalWrite (turnen del verano, HIGH); permite que el motor gire a
digitalWrite (turnRight, LOW); se asegura de que el motor gire a no gira derecha
digitalWrite (izquierda, alto); gira el motor de giro izquierda
retorno;
}
-Set pins turnen del verano y la izquierda para activar alta y el pin turnRight baja activar (desactivar) para permitir que el coche gire a la izquierda
Que el coche lo haga cualquiera de estas cosas, vas a querer llamar a estos comandos en su método de void loop (), que le permite llamar continuamente comandos para poner a prueba tu coche.
Ahora, hay varios pernos a la izquierda en el puente de H que todavía necesitan estar conectadas. Conectamos el extremo positivo del motor 1 a Pin 3 en el puente de H y el extremo de tierra del motor 1 a Pin 6 en el puente de H. Conectamos el cable de nuestro interruptor on-off al pin 8 en el puente de H. Conectamos el extremo de tierra del motor 2 al Pin 11 en el puente de H y el extremo positivo del motor 2 al pin 14 en el puente de H. Por último, conectamos el Pin 16 para el pin de 5V de Arduino a la fuente de 5 voltios para el puente de H +. Pines 4, 5, 12 y 13 en el puente de H son todos los pines de tierra, así que conectamos el pin 13 a tierra en el Arduino, corrió una línea de tierra por lo que varias cosas se podrían conectar a tierra en la línea de puente H en lugar de Arduino. Una vez que todos los conectes, estás listo para ir con su puente de H!
")

")





")
")


")
