




Swarmscapers es un mes 2 proyecto de larga investigación realizada en el estudio de Máquinas de arquitectura creativa , impartido por Jason Kelly Johnson y Michael Shiloh en el California College of the Arts en el Laboratorio de Arte Digital. Es una colaboración entre Clayton Muhleman, Alan catión y Adithi Satish. Un gran impulso el estudio de la CAM en su conjunto es preguntar qué sucede cuando arquitectos innovadores de su propia tecnología herramientas en lugar de meros usuarios de suites CAD preestablecidas y máquinas de fabricación diseñadas por ingenieros. Nadie en nuestro equipo tiene experiencia en ingeniería o electrónica, y esto no es acerca de arquitectos intentando convertirse en ingenieros y optimizar las tecnologías existentes. Más bien, el estudio de preguntas qué tipo de diseñadores arquitectónicos potenciales creativos inventando sus propias máquinas puede desbloquear y especula qué ideas socio-cultural más amplio surgen de arquitectura que es fabricado por estas máquinas.
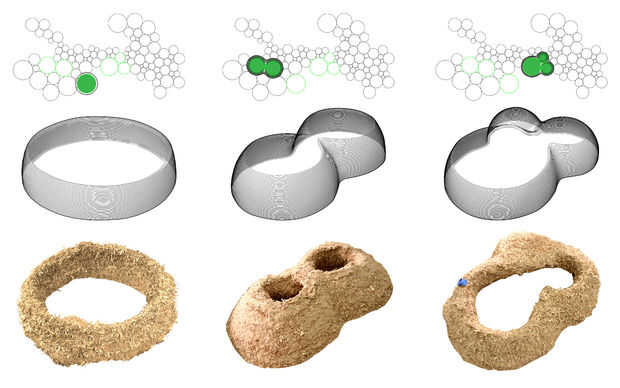
Swarmscapers explora el potencial de un autónomo enjambre de robots capaces de operar independientemente en ambientes hostiles. Utilización de materiales in situ para crear estructuras habitables, comportamiento de enjambre robótico se materializa a través de un proceso lento y constante de capas 3d-impresión. Esto proyecta el potencial arquitectónico de los emergentes robótica y tecnologías de fabricación mediante un sistema basado en reglas de abajo hacia arriba. Cada unidad del enjambre robótico actúa como un agente individual con un conjunto específico de reglas que impulsa su comportamiento y le permite coordinar con otros agentes en el sistema. Estos agentes impresión grande, arquitectura estructuras 3d que se calcifica y emergen del paisaje donde es desarrollar futuros campamentos en ambientes extremos, lugares donde los seres humanos de lo contrario no podrían construir el ímpetu para la estructura. Calor extremo y la abundancia de materias primas en el desierto hacen una cama de prueba ideal para el enjambre robótico operar, creando edificios de semilla emergente para futuras moradas que están listos para la ocupación humana a lo largo de varias décadas.
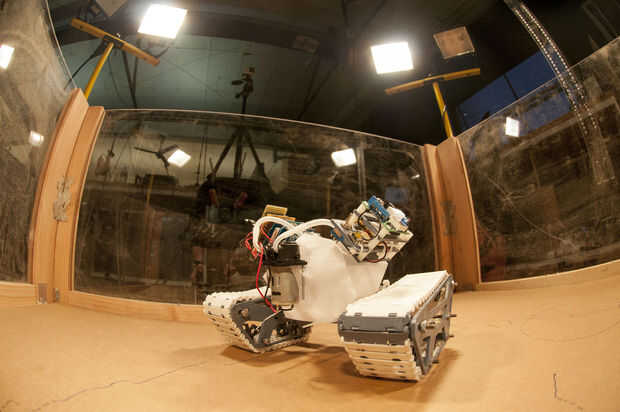
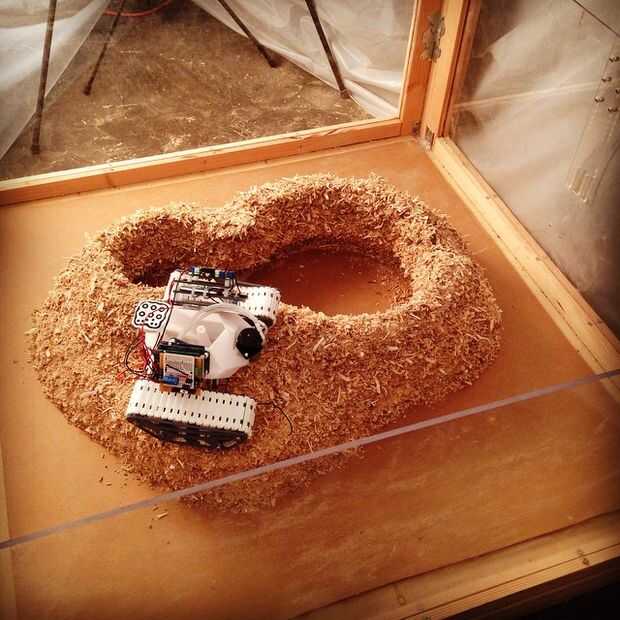
Para probar esta visión más amplia, se estableció un laboratorio hotelero enfocado en al menos uno con robot móvil 3D impresión escalada objetos dentro de una 48 "x 48" x 20 "crear volumen. Había 2 principales constantes dentro de nuestro concepto más grande que nos permitió centrar nuestra investigación y conseguir nuestro objetivo en un plazo de 2 meses, que debían crear un pórtico menos movil cama de polvo y chorro de tinta impresora 3d de la cabeza (la tecnología específica de un Z Corp Impresora 3d) y a utilizar materiales granulares en el sitio como material de construcción. Es importante para nuestra máquina a permanecer menos de pórtico y móviles ya que implica que varias máquinas algún día serán capaces autónomo 3d impresión edificios enteros, e implica que estas impresoras son relativamente pequeñas en comparación con los edificios que son 3d impresión. Las ventajas de utilizar polvo cama e inyección de tinta el cabezal de impresión en 3d como tecnología, es que nos permite imprimir sin necesidad de andamios y crear formas muy intrincadas, y nos permite reutilizar el material sobrante para que haya una cantidad mínima de residuos durante la construcción. Además, nuestro método puede trabajar con casi cualquier material granular como la arena, arroz, sémola, sal y aserrín. Ya que es importante utilizar materiales encontrados en el sitio, llevamos a cabo nuestras más grandes impresiones 3d en aserrín porque CCA genera 6 contenedores de basura llenas de polvo por semana. El aserrín es abundante y es extremadamente ligero, haciéndolo un material ideal para nosotros probar. El robot trabaja conduciendo encima del serrín basado en una trayectoria de herramienta en el equipo y dejar caer a un aglutinante en el material, endurecimiento en el lugar. Esto lo hace repetidamente, capa por capa hasta que el objeto es completa.









")
")
")

