Paso 7: Hacer trabajo XBEE y matices de Reactivision
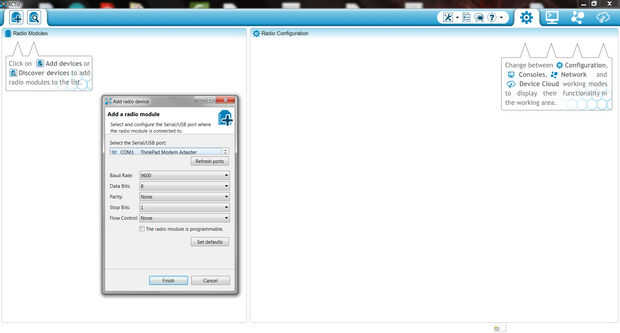

El XBEE tiene que ser configurado en un servidor a través del software XCTU. Debe agregar un nuevo dispositivo y le dan un registro único en para que pueda comunicarse. Uno XBEE necesita conectarse a USB mini-B a su computadora, mientras que el otro está conectado a un protector que se enchufa en el arduino en el robot. Esto permite la comunicación sin hilos entre la cigarra y la Swarmscaper.
Aquí están algunos enlaces buenos que nos consultaron para configurarlo correctamente: http://www.future-cities-lab.net/blog/2012/11/29/x...
http://www.Digi.com/products/Wireless-Wired-embedd...
En cuanto a Reactivision, el software debe ser abierto todo marcha en orden para Firefly leerlo. Si se trata de no abrir, la secuencia de comandos para controlar el robot no funcionará.
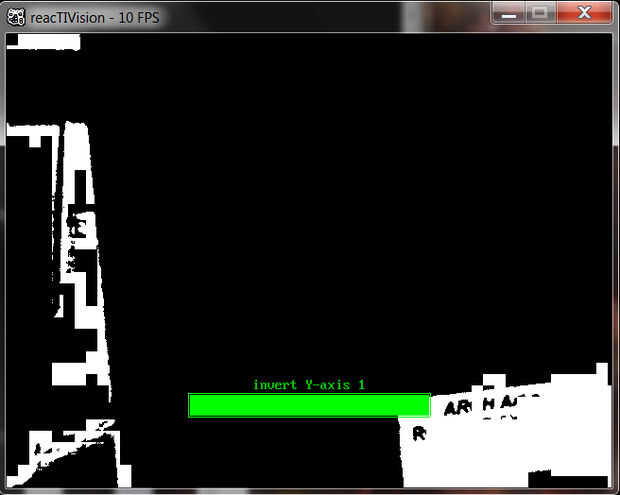
Toma un poco de retoques para hacer el ambiente físico coincide con lo que está pasando en la computadora. Si pulsa la 'i' clave de Reactivision, le dará un menú para los bancos x e y ejes de la cámara. Encontramos que si mantiene el eje x lo mismo e invierte el eje y, entonces la cámara proyecta información correctamente en saltamontes. Sin embargo, esto puede ser diferente con una cámara web diferente. Otra cosa que hemos encontrado útiles era apagar la función de enfoque automático de la webcam, como interrumpe la capacidad de la cámara para leer el marcador fiduciario.









")
")
")

