Todo el mundo que ha visto o escuchado de un Tachikoma quiere un Tachikoma. Son un ejemplo de un robot que no trata de imitar a un humano para lograr tareas complejas. Son super ágiles, puede rebotar fuera de edificios y armamento impresionante pack.
Así que si usted no puede conseguir uno, ¿por qué no hacer uno?
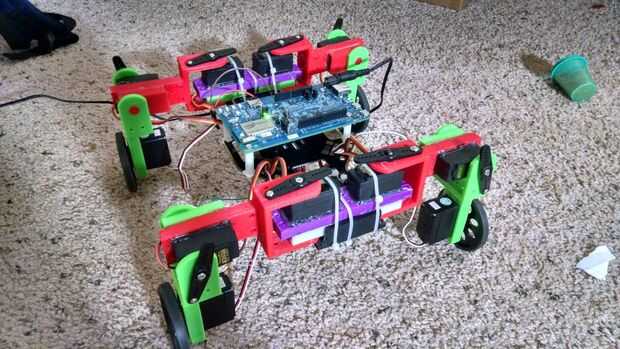
Esta es mi interpretación de Tachikoma rudimentaria utilizando un Edison de Intel como el controlador principal y un montón de servos (montón = 12). Mi objetivo principal era crear un robot que puede caminar así como rollo basado en lo que la situación exigía. Para reducir el número de servos, debido al peso y costo, las piernas son 2DOF con un servo de rotación continua en la parte inferior para movimiento sobre ruedas. Decidí usar un servo en vez de una causa motor DC que no necesita circuitos de impulsión adicional y un motor de DC con todos los engranajes y requisitos de energía sólo añadir el peso de la pierna, lo que hace imposible levantar.
La mayoría de las piezas son 3D impreso y pegué el diseño más simple posible para reducir la complejidad de los grabados y ser capaces de hacer piezas de repuesto en caso de fallas. Agradezco profundamente el estudio de invención GeorgiaTech y todo lo que es PIs por ayudarme con la impresión en 3D como este fue mi primer intento en nada 3D impreso. Sin los vastos recursos de estudio de la invención, yo nunca habría sido capaz de completar esta en mis sueños más salvajes. ¡ Muchas gracias!







")





