Paso 3: Construcción de las piernas
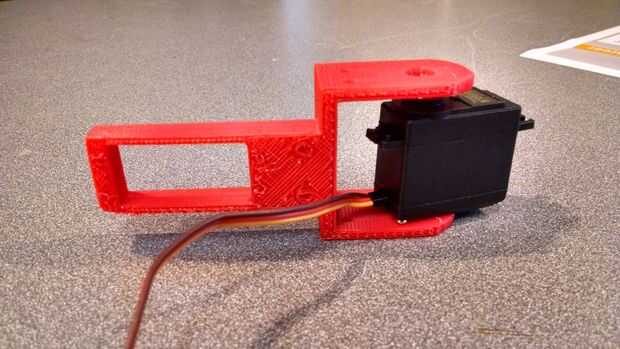


A la carne y los huesos del proyecto, las piernas. Cada pata consta de tres servos, dos para el movimiento de las piernas y uno para la rueda, y dos articulaciones pierna que cada servo tiene que sentarse dentro de la articulación de la pierna y la voluntad utilizan un soporte de servo para asegurarse de que puede girar sin problemas, como puede verse en las fotos. Los agujeros en las juntas son demasiado pequeños para tomar el soporte del servo y el brazo del servo, por lo tanto necesitan ampliarse utilizando una herramienta giratoria. Los servos también deben modificarse ligeramente como las abrazaderas del tornillo en el lado evitar que se ajuste en las articulaciones. He cortado con un par de alicates de corte y luego lija suave con la cabeza lijar.
Antes de comenzar, siempre centro de tus SERVOS! Usé un receptor RC para asegurar que se centraban. Si usted no el centro, el rango de movimiento será irregular podrán rotar en diferentes grados en cada dirección y no puede conseguir un adecuado movimiento a pie. La continua rotación de servos no necesitan estar centrados, causa que no tienen un centro (ba-dum-tiss).
La ampliación debe hacerse gradualmente, no desea que la articulación sea demasiado flojo o demasiado apretado. He usado cabezales se muestra en los cuadros sucesivamente hasta que las piezas encajan. Además, no ejecutar la herramienta a una velocidad demasiado alta ya que el calor generado puede derretir el plástico y deformarse. Una vez Conecte la ' articulación ', es decir, el servo del conjunto que le da hasta abajo movimiento, Monte la Junta 'cadera' necesita ser pasa a través del soporte de 2 servos y entonces unido a la articulación. Los brazos de servo son enganchados a los agujeros en las uniones mediante los tornillos que vienen con el servo. La parte inferior del soporte del servo y los servos se son caliente pegado al plástico de las articulaciones. El pegamento caliente forma una sorprendentemente buena adhesión con el plástico.
Cuando termines con los dos brazos individualmente, modificar el servo de rotación continua e introdúzcalo en el soporte de servo inferior en el extremo de la articulación, con el fin de la marcha hacia la parte inferior. Las ruedas se unirá en una etapa posterior.
Cuando las piernas están a prueba para asegurarse de que se muevan como era de esperar. Para la prueba, conectado un receptor RC en los servos para que cada una de las entradas de control se asigna a un servo. Funciona la configuración entera con el BEC y el LiPo y había probado que la pierna se mueva suavemente como se ve en el video.
Finalmente os adjunto las piernas en el soporte de 2 servos para conseguir una unidad, como se ve en la foto. Pegamento caliente al rescate otra vez.
El procedimiento anterior debe seguirse otra vez para obtener otro conjunto de dos patas.







")





