Paso 6: cableado




Los servos necesitan conectarse al controlador I2C, que se une a la parte inferior de la base a todos. Cada pata tiene tres servos, dos para el movimiento de las piernas y uno para el movimiento de balanceo. He decidido agrupar las clavijas por las patas y las ruedas. "Cadera" conectar los servos son todos primero seguido de la rodilla "servos". Los cables pasan por los agujeros rectangulares en la placa base y están entonces conectados al conductor, de modo que se agrupan según la pierna y ayuda a poner en orden los cables un poco. No quería hacerlos demasiado apretado como luego restringiría el movimiento de las piernas. Últimos son conectar los servos de la rueda. Para una ordenación apropiada de pernos, el código debe ayudar. La numeración dada a los pins de servo coincide con su orden de las conexiones. Los servos se pueden conectar en cualquier orden pero agrupándolas ayuda a hacerlos más fáciles de manipular en el código.
El controlador I2c es alimentado directamente desde el BEC a través de su propio conector de alimentación. El Edison no alimentar a los servos, solo para alimentar el controlador de sí mismo.
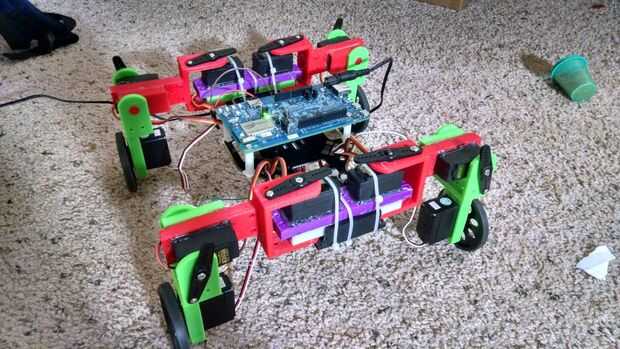
Después de todos los servos se enchufado y el BEC conectado al conductor, os adjunto el controlador y el BEC en la parte inferior del robot utilizando la cinta de doble cara.
Entonces conecté el I2C, Vcc y tierra puertos a los puertos correspondientes de la ruptura de Arduino de Edison. Esto fue para pruebas solamente, ya que pasar los cables a través de la base al instalar el desbloqueo en la parte superior del robot. El pin SDA va al pin A4, SCL a A5, Vcc 5V o 3.3V y Gnd a GND.
Luego até al Edison a la parte superior del robot después de que los bancos lo la manera derecha para arriba.
Plan para la Edison con una línea de 5V del BEC pero para probar sólo lo alimentado fuera de la verruga de la pared o USB.







")





