Paso 8: Y gracias por el fis... Edisons
Al final, no pude mover como quería, por lo tanto, no hay video :(
Pero voy a seguir trabajando en esto y adaptar el diseño como improvisador. Un problema que encontré fue el centrado de los servos. Nunca parecían volver a su posición original como codificada en el programa. Con el controlador RC, manualmente ajustar los ajustes o dio un pequeño control opuesto a en el centro, pero cuando fueron controlados mediante programación, eso nunca sucedió!
La solución a esto podría utilizar cinemática inversa para calcular exactamente lo que la posición de la pierna estaba en un movimiento determinado y dar señales de control basadas en la. Se requiere conocimiento más mecánico se requiere.
https://en.wikipedia.org/wiki/Inverse_kinematics
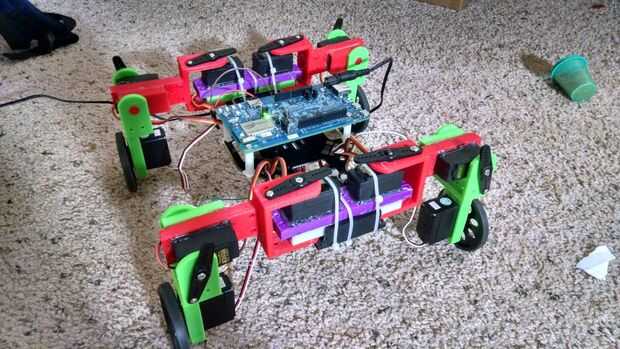
Además, el peso y el tamaño del robot final resultó perjudiciales para su movimiento. El cuerpo utilizado para doblar cuando se levantó una pierna. Por lo tanto, colocando la pierna hacia abajo, no sería capaz de volver a levantar el robot. El cuerpo debería haber sido nivel mientras movía la pierna. La solución para esto es muy sencilla, voy a reducir la altura de las piernas y y el cuerpo más compacto. Tan las piernas dos o tres en el piso deben ser capaces de soportar cuando una pierna está en movimiento.
Por último, quiero incorporar algunos mecanismos de movimiento híbrido, tales como:
1. Añadir un montón de sensores como un giroscopio, acelerómetro e infrarrojo para darle cierta capacidad de evitación de conciencia y obstáculo de orientación. El conocimiento sobre la orientación debe ayudar en la ejecución de movimientos complejos.
2. movimiento en espiral, tipo de como una maniobra de freno fresco 180 grados en un coche. El robot debe ser capaz de continuar avanzando mientras gira y apunta en la dirección opuesta.
3. una especie de 'banca' de movimiento, donde todas las patas alteran su ángulo de inclinación a la vez y los bancos de robot. Esto puede ayudar cuando se viaja en una superficie inclinada.
4. un movimiento de descenso, donde todas las piernas más bajas para permitir que el robot subir o bajar y mirar hacia arriba o hacia abajo cambiando la altura del frente o la espalda.
5. interfaz lo a un controlador de PS2/PS3 para que todos estos movimientos pueden asignarse a joysticks diferentes botones y analógico para dar al usuario un rango completo de movimiento.
También voy a intentar trabajar en la MRAA para el I2C por lo que seré capaz de usar la mini-breakout Junta, reduciendo así la necesidad de espacio en el robot.
Con todo, ahora con una plataforma casi trabajo para futuros emprendimientos robóticas y consiguió un montón de experiencia en impresión 3D, CAD, el Edison plataforma y por qué servos baratos chupan: P (todo músculo, ninguna delicadeza).
Terminó como un prototipo para un rover de Marte del futuro/pasado en lugar de un lindo y amigable, mortal Tachikoma pero no tengo ningún problema con eso :)
Agradecimientos:
¡ Gracias instructables para gustar mi idea y darme un Edison y otros sensores y dispositivos para trabajar con! Gracias también al estudio de GeorgiaTech invención para vivir de sus impresoras 3D durante semanas y permitirme fallar varias veces dando lugar a una carga de piezas de plástico extrañamente deformadas!
Gracias a SM por ayudarme con la construcción, especialmente con el código y adquirir las piezas. Un montón de ideas y Duckies de goma se atribuye a él!
También gracias a AR y AR para ayudar con las diferentes modificaciones de la parte y al azar hurgando!
Espero que les guste mi proyecto! Si te gusta, por favor, vote por mí en el concurso Intel IoT Invitational!
La red es realmente vasto e infinito! (toque de pista)







")





