Paso 3: Montaje de dedo






Todos los dedos incluyendo el pulgar siguen la misma estructura de montaje básico y utilizan los mismos componentes. Al montar el cheque ordenó a cada paso (un párrafo por) con las imágenes de arriba. En la Página de Github también he incluido otro pdf de instrucciones de montaje así que usted puede hacer referencia a si.
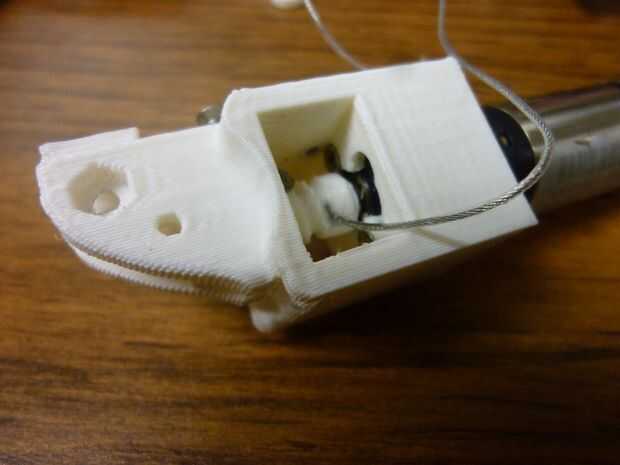
1. en primer lugar tomar la longitud de cable de acero, un nudo en un extremo y el punto que con pegamento para asegurarse de que no resbale. Tome la bobina y tire el cable por el orificio más pequeño por la parte superior de la parte que comienza en el diámetro exterior de la bobina y pasa hacia fuera en el interior del diámetro del carrete. Tire ahora el resto del cable a través de hasta sólo el nudo queda en la parte exterior del orificio. Enviar el extremo libre del cable a través del orificio más grande de la bobina, comienza en el interior del diámetro de la bobina y salir a la arista exterior de la bobina.
2. Tome un ajuste de motor y presione el carrete en el eje del motor. Asegurar que se alinearon la parte plana del eje del motor con la parte plana de la bobina. Si esto no está alineado correctamente tiene el riesgo de dañar la bobina.
3. ahora toma la pieza de la carcasa del motor. Inserte dos tornillos de 6mm M2 en los pequeños orificios a ambos lados de la abertura más grande. Subir la combinación motor/bobina a través de este agujero más grande y el tornillo en el motor a la caja.
4. recoger la parte de punta de dedo y la articulación. Utilizando un 12mm M2 tornillo y tuerca de apriete el acoplamiento en la ranura en la parte de punta de dedo. Asegúrese de que esté lo suficientemente flojo como para todavía girar libremente.
5. ahora toma la parte inferior del dedo y deslice la combinación de acoplamiento y el dedo dentro de ella. Ver la orientación. Atornillar las piezas de dos dedos por el agujero restante en la parte de punta de dedo con un 20mm tornillo M2.
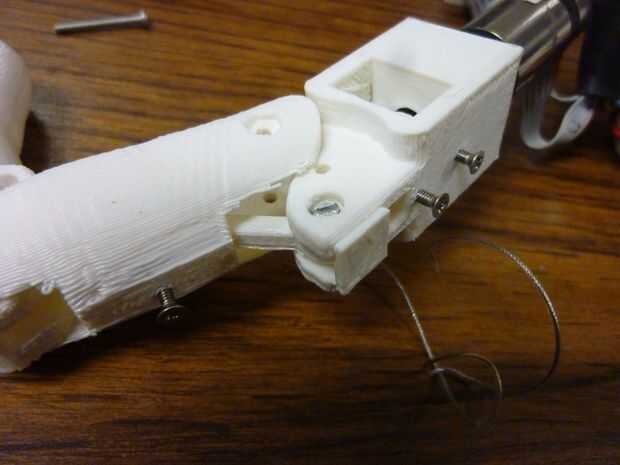
6. Tome las piezas parcialmente ensambladas del motor caja y dedo y fije el extremo libre de la vinculación en el orificio correspondiente en la caja del motor con un tornillo de 12mm M2. Usted tendrá que doblar el dedo para poder hacer esto.
7. Ahora pegue el agujero restante en la parte inferior del dedo en el agujero restante en la carcasa del motor mediante un tornillo M2 de 20mm.
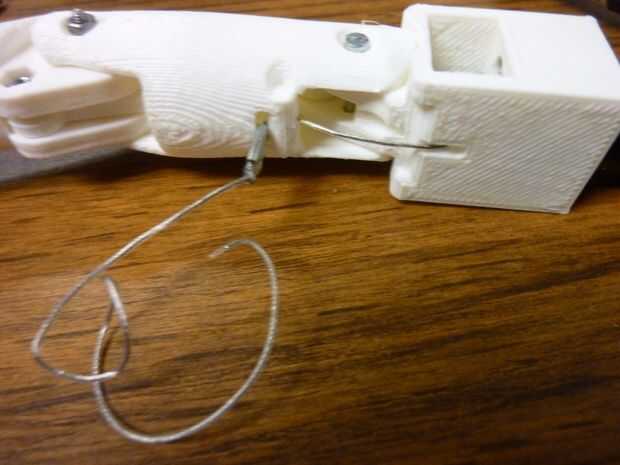
8. ahora pase la longitud de cable restante en el interior de la carcasa del motor y a través del orificio en la parte cilíndrica de la pieza inferior del dedo. Una encrespadura de alambre o un nudo en el cable de acero y añadir un punto de pegamento para la fuerza. Utilice el cortador de alambre para el cable de clip.
9. Repita este proceso de ensamblaje de dedo para todos los dedos y el pulgar. Tenga en cuenta que el pulgar tiene una pieza de punta de dedo diferentes pero el resto sigue exactamente igual. Una vez que se montan todos los dedos, tomar dos piezas de mano y plana los ponen. Tenga en cuenta que uno tiene 4 agujeros. Se trata de la placa posterior de la mano. Línea de todos los motores en esta parte y pegar cada uno en la parte posterior de la placa utilizando un 6mm tornillo M2. Tome la placa y colocar a los dos dedos apropiados con tornillos de 6mm M2.
Ya he actualizado los archivos de CAD para la protésico mano. Por favor deje la alimentación













