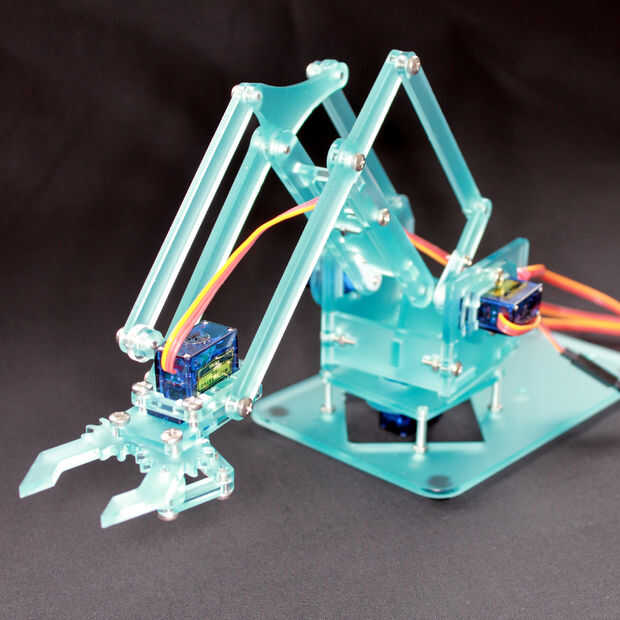
El MeArm es un brazo de Robot de tamaño de bolsillo. Es un proyecto iniciado en febrero de 2014, que ha tenido un viaje muy rápido a su estado presente gracias a su desarrollo abierto como un proyecto de Hardware abierto. Versión 0.3 apareció en Instructables en abril del de 2014 y que hemos visto construido en el mundo, desde su hogar en el Reino Unido a EEUU, México, Suiza y Japón, para nombrar sólo algunos.
Vendemos un kit de aquí , pero todos los archivos están disponibles para que usted puede construir su propio! Estamos basados en el Reino Unido pero si usted está en el control de Estados Unidos la Hackaday almacenar aquí y para los distribuidores globales aquí.
Antes de empezar con este instructable, por favor compruebe su versión!
Este tutorial es para la v0.4. Ahora tenemos una disponible en mearm.com y las instrucciones para la v1.0 v1.0 aquí
Todas las versiones anteriores y esto pueden encontrarse en thingiverse.
Esta guía cubre cómo construir la v0.4. Actualmente se dispone de código para el Arduino, Raspberry Pi, Beaglebone negro y Espruino.













