Paso 20: El último paso!

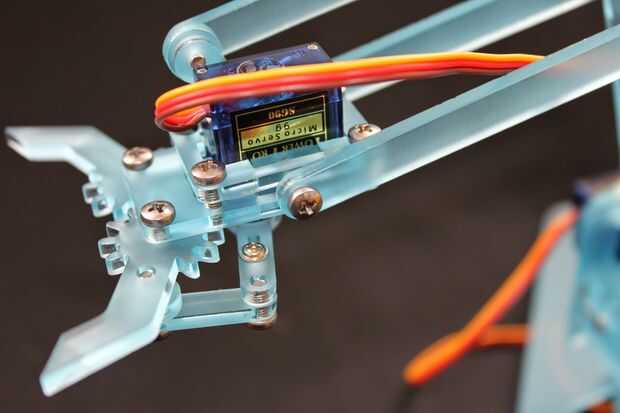
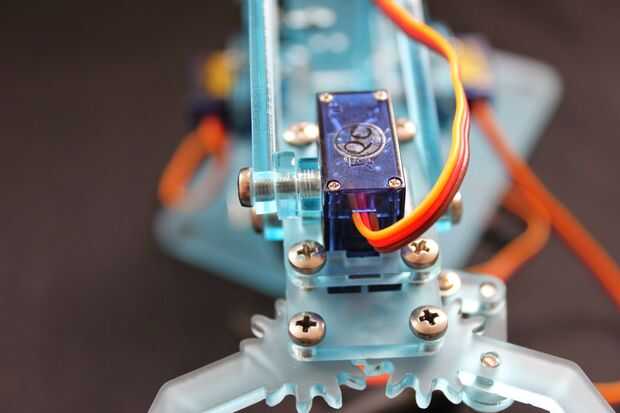
Todo lo que queda es poner la garra al resto del robot! Utilice dos tornillos de 8mm en el perno de la garra y el final 10mm con un espaciador para fijar la muñeca. 8mm tornillos normalmente entran en contacto con la parte superior e inferior de la abrazadera antes de encontrar el agujero en el espaciador de piezas, usted puede hacer esto más fácil aflojando los tornillos para el servo de la almeja un poco.
Ahora es el momento para conectarse a su dispositivo favorito! Enlaces son en la primera página del instructable del código disponible y guías de conexión con cada uno. Donde puede usar 6V para los servos, voltios extra vale la pena un poco de esfuerzo de torsión.
Una vez conectado puedes encontrarte necesita hacer ajustes finos de la estructura, probablemente has partes apretado y tendrá que darles un poco flojo.
Espero que usted ha disfrutado esta versión de código abierto! Estoy deseando ver tu #meArms en acción!













