Paso 3: Configuración del módulo del controlador de Motor
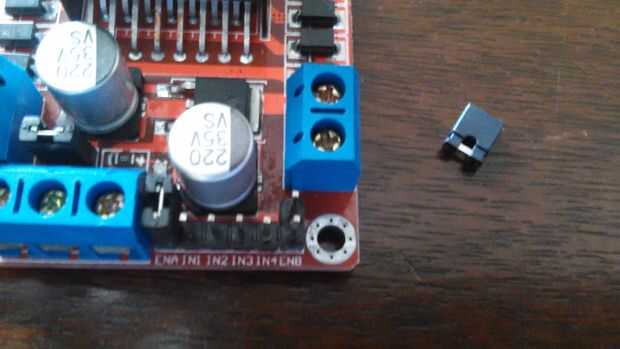

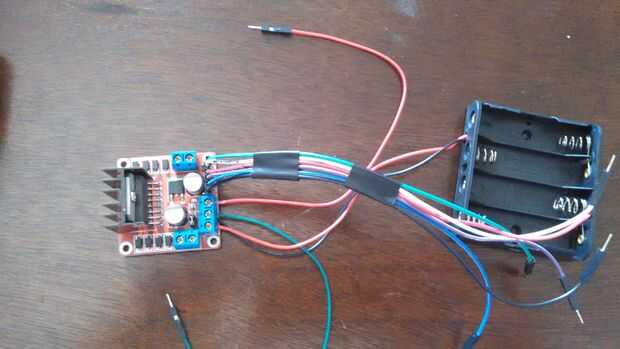

1. Si usted quiere ser capaz de controlar la velocidad de cada motor de corriente continua mediante PWM debe quitar los puentes sobre hacernos y enableB del módulo del conductor del motor como se muestra en la imagen. Éstos se unen a un pin PWM de Arduino más tarde.
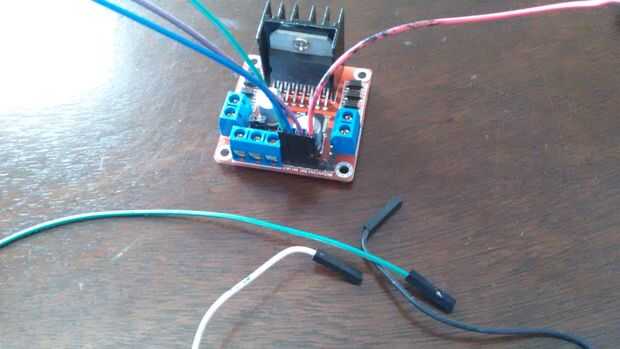
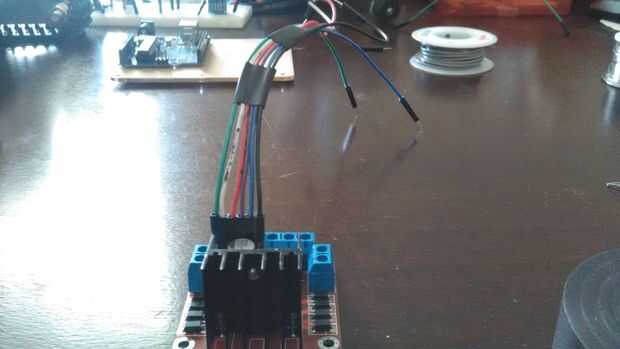
2. crear un arnés de cableado para la EnA/EnB y IN1/IN2/IN3/IN4 como se muestra. (A grabado 6 cables de puente de la mujer al hombre)
3. antes de actualizar a la batería de Lipo usé una batería 4xAA 6 voltios para la prueba. Conecte el positivo y negativo del módulo de Pos y Neg de batería.
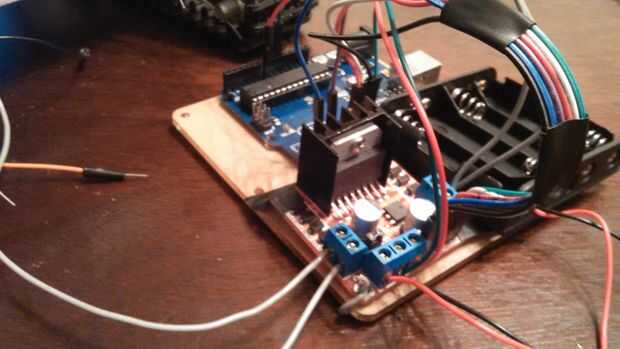
4. Conecte cada uno de los pasadores de IN1, IN2, IN3 y IN4 a un Pin digital de Arduino. Si va a utilizar mi código Asegúrese de usar el Arduino pernos especifican no los muestra en la imagen.
5. conectar la clavija hacernos y EnableB del módulo en 2 pines PWM de Arduino. Otra vez para mi uso de código los pernos especificados no uno se muestra en la imagen.
6. Conecte la tierra desde el bloque de terminales del controlador de motor a uno de los motivos de la Arduino.
7. recorte un poco de alambre de aproximadamente 8 pulgadas de largo para cada uno de los 4 bloques de terminales. Todos los extremos de la tira.
8. Desenrosque los tornillos de los bloques de terminales e Inserte un alambre en cada uno antes de atornillar hacia abajo otra vez. Estos cables se sueldan a los motores de corriente continua montados en el chasis del tanque en el siguiente paso.
Nota: El conductor del motor L298N tiene una salida de 5 voltios en uno de sus bornes. Esto puede ser utilizado si la tensión es superior a 7 voltios. Para la batería 4xAA paquete utilizado anteriormente para el Vin de la prueba sólo será por lo tanto no debe utilizarse la salida 5v del módulo controlador de motor de 6v. Después de actualizar a la 11.1v lipo batería 5v salida puede utilizarse para alimentar los sensores y Arduino.
Para información más detallada sobre el módulo de controlador de motor L298N consultar esta página:




 utilizando un Arduino")






")

