Paso 3: SN754410NE Motor Driver
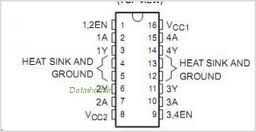

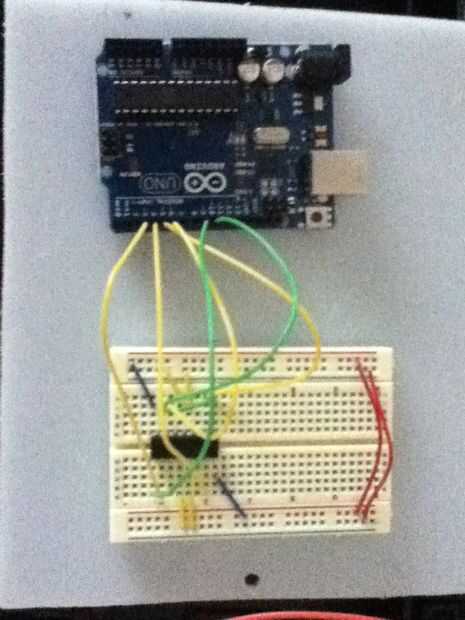
Bueno, por lo que ahora se explica cómo conectar el controlador de motor con el Arduino Uno. En primer lugar, conectar todos los pines de tierra a tierra en el protoboard que son patillas 4,5,12 y 13 del controlador del motor. Conectar patillas 1 y 16 del controlador de motor a pines 9 y 10 en el Arduino. A continuación, conecte los pines 2 y 7 del controlador de motor a los pines 3 y 4 en el Arduino, que son las entradas del motor izquierdo. Después de que sea completa, conectar pines 10 y 15 del conductor a los pines 5 y 6 en el Arduino, que son las entradas del motor derecho. Pines 3 y 6 del conductor del motor deben conectarse el motor izquierdo y los pines 14 y 11 deben conectarse el motor adecuado. Pines 3,6,11 y 14 son los terminales de salida, que significan que se envíe la señal de la Arduino a los motores y Dile al moverse o cuando ser estacionario. Y las dos últimos clavijas que son los pines 8 y 16 del controlador del motor necesitan ser conectada a la alimentación en el protoboard. La fuente de energía será una batería de 9 voltios conectada a la placa como se muestra en uno de los cuadros.




")
")



![3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]](https://foto.askix.com/thumb/170x110/c/58/c58e3803baa24b310292be19feb85290.jpg "3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]")
")


