Paso 7: A.A.T. código

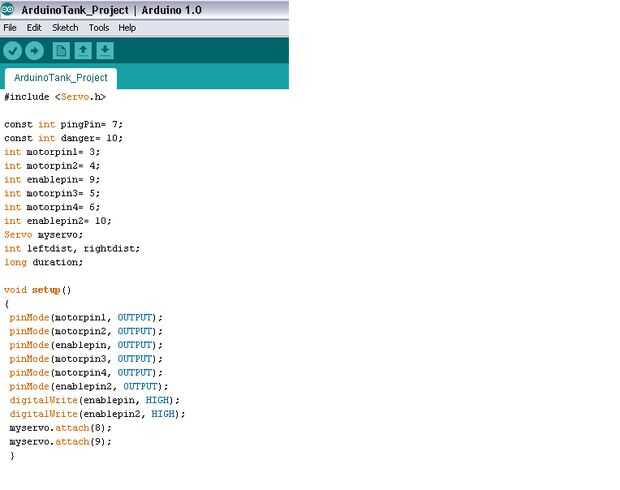
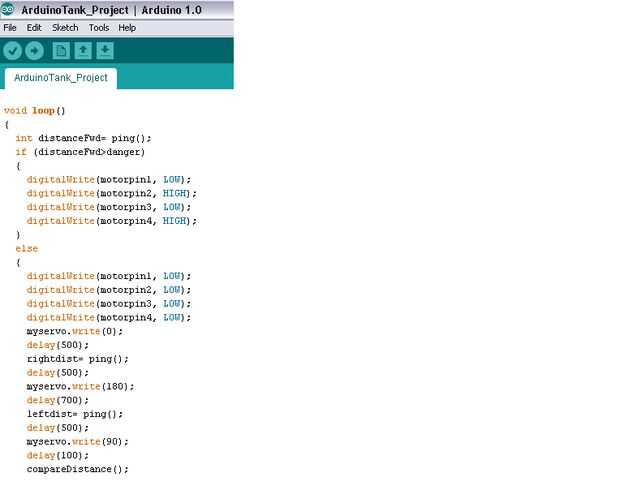
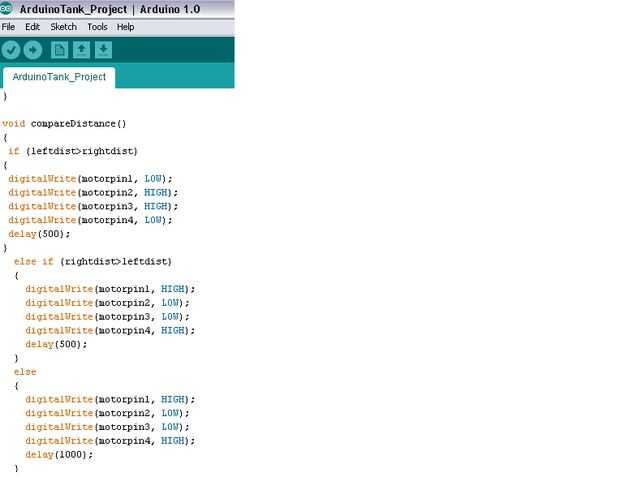
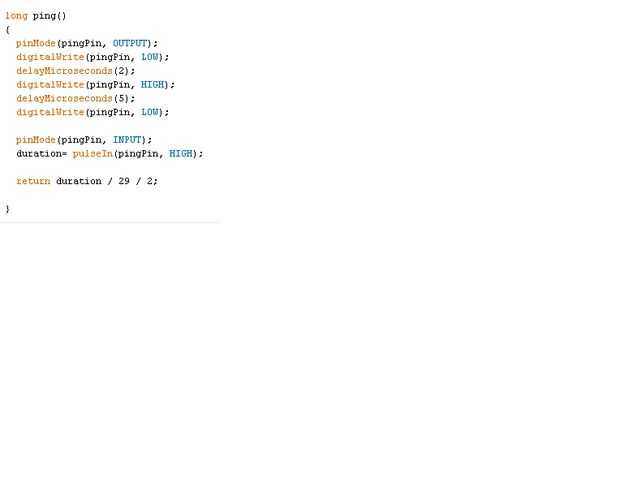
En primer lugar, el programa le dirá al robot a moverse hacia delante hasta que se encuentra a 10 cm de distancia de un objeto. Si está en esta gama el programa le dirá ahora el robot para detener y escanear ambos lados utilizando el sensor Ping. Una vez que ambas partes han analizado el programa puede ahora determinar qué lado es más claro y más seguro para el robot a avanzar hacia esa dirección. Si ambas partes no son claras y tienen objetos bloqueando el camino de los robots, se encenderá un completo 180 grados y continuar su trayectoria sin chocar.
El bosquejo de este robot se puede encontrar en el enlace de más abajo. No dude en utilizarlo y modificarlo a su gusto.




")
")



![3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]](https://foto.askix.com/thumb/170x110/c/58/c58e3803baa24b310292be19feb85290.jpg "3D impreso Sumobot [autónoma RC, Multiplayer Bluetooth]")
")


