Paso 5: El cableado

1) Conecte el IR led al pin 10 en el arduino. Y el pin negativo a la tierra fija en el arduino
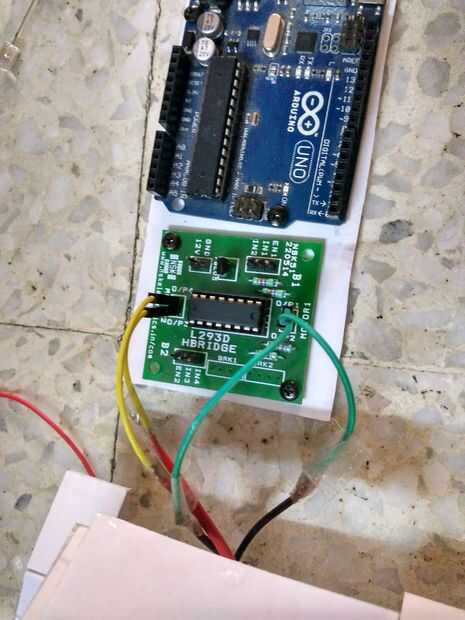
2) Conecte su DC motores H-bridge(If you decide to use L293D then follow this).
Pin 2 del L293D al pin 3 de arduino
PIN 7 del L293D al pin 4 de arduino
PIN 10 del L293D al pin 6 de arduino
PIN 14 del L293D al pin 7 de arduino
3) Conecte la señal del servo (cable generalmente naranja) al pin 9 de arduino
4) la Rx de Tx del arduino y Tx del módulo bluetooth a Rx del arduino módulo bluetooth. (El lugar más común donde la gente comete el error. Asegúrese de que usted no se: D)
5) el receptor de IR (el derecha más pin si el lado desigual es mirando hacia usted) al pin 11 en el arduino. El medio pin a 5v y el pin de la izquierda es la tierra.
6) Conecte un rojo (cualquier color no importa) led al pin 13 de arduino (la pata más larga) y el otro al suelo.




")
")







