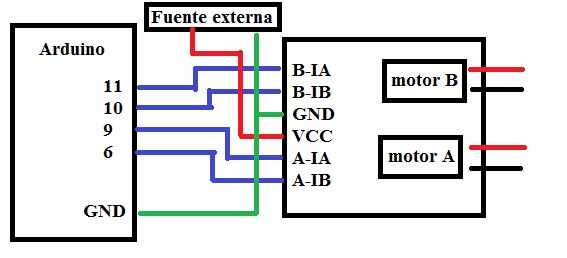
Paso 3: Arduino, para controlar el movimiento del vehículo.

El en el arduino utilizado es:
Arduino nano V3.0, también desde dx.com
La ventaja de este arduino es su compacto tamaño, pero a la vez trae una dificultad; el no permitir conexiones de cables (tipo macho) sobre la placa puesto que este arduino esta pensado para ser montado sobre un protoboard. Para este instructivo se utilizaran los siguientes pines del arduino:
11
10
9
6
*****************************************************************************************************************************
De cualquier forma, un arduino uno o mega tambien servirá para este vehículo.
Lo bueno de este proyecto es casi no se traductor librerías especiales o cosas muy difíciles de encontrar.
*****************************************************************************************************************************
El arduino se encarga de al recibir datos a través del modulo bluetooth, sea capaz de tomar acciones y de esta forma asignar valores lógicos al puente H y así desplazar el vehículo oruga según el comando recibido por bluetooth.
Los comandos asignados para los filtro-regulador movimientos son:
1, movimiento del vehículo hacia adelante.
2, movimiento del vehículo hacia atrás.
3, giro del vehículo hacia la izquierda.
4, giro del vehículo hacia la derecha.
a, detención del vehículo.
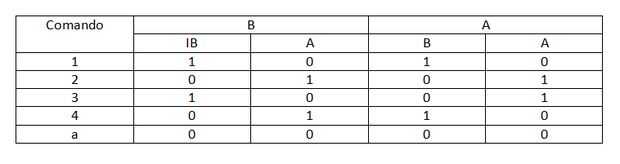
De la misma forma, a cada una de estas instrucciones se le asigna una instrucción sobre el puente H de 2 canales, las cuales serian (Esto dependerá de la forma en la conectes los motores al puente H). La estructura sera la siguiente:
"comando", {B-IA * IB B} y {A-IA * A-IB}
Quedando de la siguiente forma
1, {1 * 0} y {1 * 0}
2, {0 * 1} y {0 * 1}
3, {1 * 0} y {0 * 1}
4, {0 * 1} y {1 * 0}
a, {0 * 0} y {0 * 0}
********************************************
Revisar imagen contiene una tabla
*********************************************
No agrego info de mas, puesto en el ultimo paso, subire todos los archivos.




")




")



