Paso 1: Configuración del robot

Después de ensamblar el robot pisadas con el Kit de chasis Tri-Track, Monte un Kinoma crear en la base.
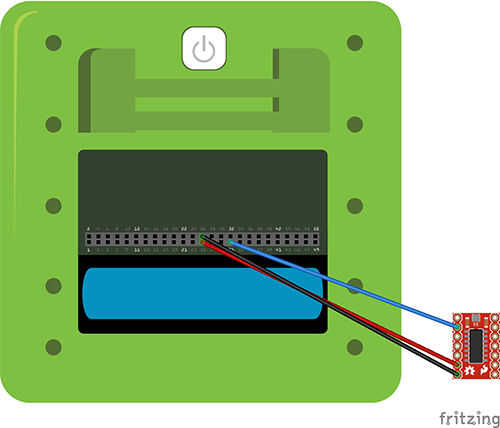
Usando el Kinoma Create pines de nuevo, coloque puentes de 3,3 V y tierra pines UART TX a la palanca de cambios de nivel de voltaje.
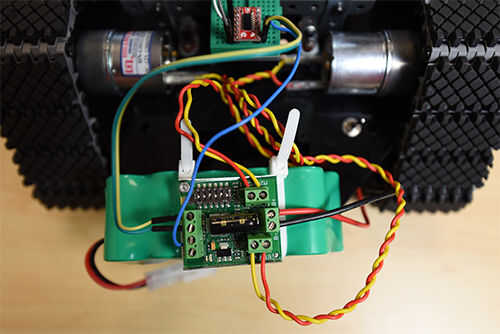
Utilizar puentes de los pernos de tensión cambió de puesto a las entradas con la etiqueta 5 V, GND y S1 en el conductor del motor de Sabertooth. Conecte los cables de motor apropiados al conductor del motor de Sabertooth y potencia con una batería de 12 V. Asegúrese de que usted ponga los interruptores en el tablero a modo de serial simplificado.





")

")





