Paso 2: Configuración de los controles de tanque




Nuestro diseño usa potenciómetros que giran cuando maneja. Los diferentes valores de tensión generan son alimentados en los pernos que están configurados para recibir las entradas analógicas mediante software y luego interpretados por el Kinoma crear para indicar la velocidad y dirección. No dude en soportes de diseño con esta estructura de entrada y salida en la mente. Potenciómetros deslizantes funcionan bien, o usted puede construir una unidad impresa 3D que alberga los potenciómetros y manijas.
Cuando su diseño salidas valores de tensión adecuados, darles de comer al Kinoma crear utilizando el delanteros pernos o pins 37-48 en la parte posterior (excepto pines etiquetados tierra). Tenga en cuenta que la tensión máxima en cualquier clavija de entrada debe ser de 3.3 V. Después de elegir cualquiera de estos pines, vaya tomain.js que se encuentra en el archivo etiquetado como 'fuente' en el control de tanque y cambiar el valor de las variables con la etiqueta: rightMotorPin y leftMotorPin a sus respectivos números.
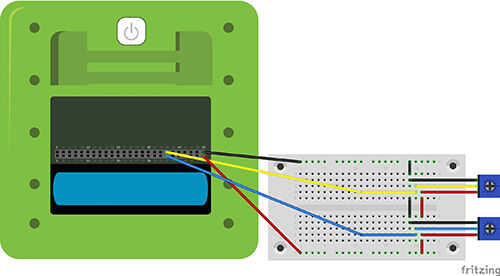
A ver si el Kinoma crear correctamente es leer estos valores, vaya a la aplicación de explorador perno situada en la pantalla de inicio de cada crear Kinoma para comprobar los valores que se están viendo sus pernos. Un ejemplo de cableado está incluido arriba.
Ahora que todo está conectado para arriba, ya estamos listos para calibrar la velocidad del robot para rango de salida de voltaje de su diseño. La configuración es fácil. Ejecución tanque-robot en el crear de Kinoma enganchadas a su robot y el control de tanque en el Kinoma crear que está leyendo los valores de su tensión. Recuerde: ambos dispositivos de Kinoma crear tienen que estar en la misma red Wi-Fi para comunicarse. El software asume que los valores más altos de tensión significan movimiento hacia adelante. Tan en una escala de 0 a 1, 1 sería completa hacia adelante y 0 sería inversa completa. Una vez que ambas aplicaciones se están ejecutando, verá dos botones: "Drive" y "Configurar motores", en la pantalla de Kinoma crear de tu robot. Pulse el botón "Configurar motores".
Establecer cualquier entrada analógica que estás utilizando para cada posición de la lista (max es decir derecha adelante, izquierda min inversa, etc) y simplemente pulse el botón correspondiente para establecer el valor. El programa conoce a almacenar estos valores para futuras carreras y recalibración es necesario solamente cuando se borra la caché en el crear de Kinoma.
Usted puede volver al menú principal y seleccione el botón de "Drive" para mostrar un mensaje en el tanque. Este mensaje puede cambiarse cambiando la inmain.js de la variable "tankMessage" ubicado dentro de la carpeta src del tanque robot.
Suponiendo que te hayas conectado todo correctamente y apuntan a robot tanque y tanque de control en dispositivos de Kinoma crear adecuados, debe ser capaz de conducir tu tanque!





")

")





