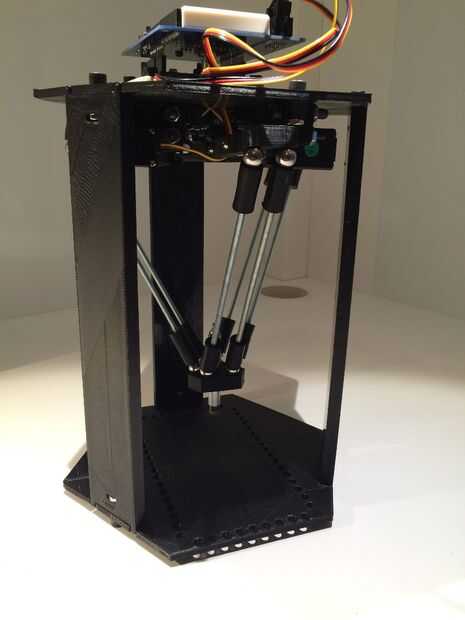

El Tapsterbot 2.0 es un deltabot de código abierto, que pretende ayudar a la comprobación de aplicaciones móviles en dispositivos reales (iOS, Android, etc), pero que podría servir como una excelente introducción a la robótica y Arduino.
Aquí, montamos 3 componentes idénticos de brazo del Servo. Te mostramos paso a paso cómo crear el primero de ellos, luego a repetir estos pasos en los restantes 2 componentes. Cuando montado, debería verse más o menos como la foto de arriba (los colores pueden variar).
Aquí la lista de piezas es de 1 componente: necesitarás 3 x de todo para que los tres
Para cada componente se necesita (en orden aproximado):
- 1 servo Hitec HS-311 (rotación a la derecha) - ver lista de materiales para más detalles
- 1 hélice de 2 palas en forma de cuerno del servo (la parte blanca que cabe en el eje del servo, debe ser incluido con el kit de servo)
- 1 tornillo para la fijación de horn de servo al eje (se debe incluir en el kit de servo)
- 1 soporte de servo
- 2 6-32 tornillos de cabeza hueca
- 2 tuercas hexagonales 6-32
- 1 viga de 9 x 1
- 1 brazo de servo con imanes integrados (de brazo montaje Instructable)
- Set de 2 tornillos pequeños de servo, para caber en los pequeños orificios en el cuerno
- 2 10 32 3/4 en Socket cabeza tornillos
- 2 tuerca hexagonal tornillo de máquina de tamaño insuficiente de 10-32




 (impresión 3D)")




")



