Ver el BOM para más detalles:
- 4 vigas de 3 x 1 (para asegurar el teléfono en la base)
- 5 vigas de 9 x 1 (2 para la placa Arduino, 3 asegurar asambleas de Servo a la placa superior)
- 2 placa de 11 x 1 (seguro el teléfono a la base)
- 12 acoplamiento (a los brazos de servo a los antebrazos y los antebrazos para el sostenedor de la aguja)
- 3 montaje del servo (a los servos en la orientación correcta de la casa)
- 1 sostenedor de la aguja (sostiene el lápiz capacitivo)
- 3 brazo superior (conecta los servos a los brazos de servo)
- 1 placa superior (mantiene las Asambleas servo en su sitio)
- 1 placa base (casas el dispositivo bajo prueba y proporciona la base para el robot)
- 3 placa lateral (conexión entre la parte inferior y la parte superior)
- 1 placa Arduino (cerros Arduino, le permite fijarse a la parte superior del robot)
Notas en 3d piezas impresas, de la experiencia:
- Utilicé una impresora FlashForge Creator Pro. Lulzbot TAZ 4 fue utilizado para el robot original de Jason
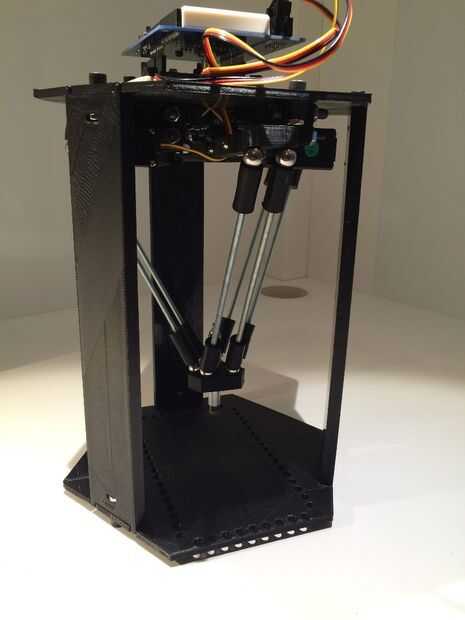
- La impresora FlashForge no tenía una base lo suficientemente grande como para imprimir las placas superior e inferior. Usa SCAD y un paquete llamado "puzzlecut 3d" dividir los modelos en dos y crear cortes "puzzle piece", que les permitieron conectarse. Si usted estudia las imágenes, verás que mi segmentos superiores e inferiores están hechos de dos piezas
- El sostenedor de la aguja fue impreso en escala del 107%, ya que tenido problemas frecuentes con los imanes de barra partir el plástico
- Los acopladores fueron impresas en escala de 110% por la misma razón
- Las piezas del brazo superior en estas fotos muestran algunos partiendo de los imanes de barra. Deben ser re-impreso en algún momento, pero simplemente no puede ser escalados debido a la colocación de los orificios que conectan el brazo con el servo. Implican ampliación del agujero antes de la impresión o después de la impresión (que no es tan escalable)









")



