Paso 6: Tercera prueba - control de motores
Qué you´ll necesita:
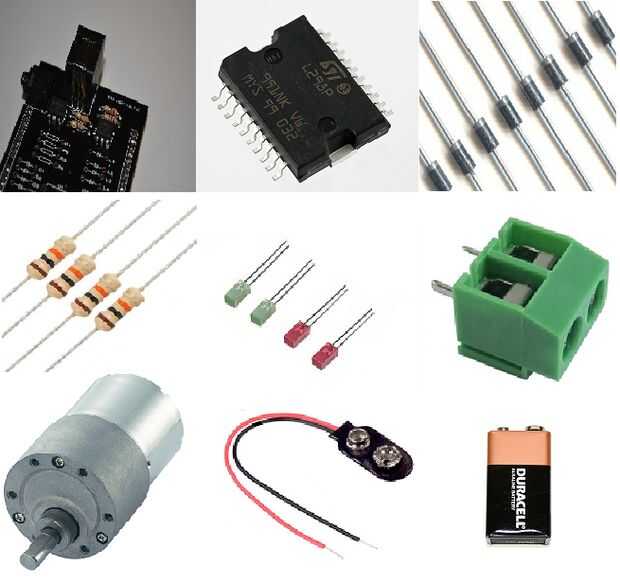
-1 x tb.shield
-1 x L298P
-8 diodos x 4004
-4 x 10 k Ohm Resistor
-4 x 5 mm led
-3 x 2 conector de tornillo
-1 x Motor de la C.C.
-1 x adaptador para batería de 9v
-1 x pila de 9v
El código de motor 1: descargar aquí - Test motor1.
# define PIN_M1_DIRECTION_FW 2 / / m1 adelante
# definir 4 PIN_M1_DIRECTION_RV / / revés m1
# definir 3 PIN_M1_SPEED / / velocidad de m1
void setup() {}
pinMode (PIN_M1_DIRECTION_FW, salida);
pinMode (PIN_M1_DIRECTION_RV, salida);
pinMode (definir PIN_M1_SPEED, salida);
}
void loop() {}
analogWrite (PIN_M1_SPEED, 255);
digitalWrite (PIN_M1_DIRECTION_FW, alto);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, alto);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
}
El código de motor 1: descargar aquí - motor2 test.
# define PIN_M1_DIRECTION_FW 7 / / m1 adelante
# define PIN_M1_DIRECTION_RV 8 / / revés m1
# definir 5 PIN_M1_SPEED / / velocidad de m1
void setup() {}
pinMode (PIN_M1_DIRECTION_FW, salida);
pinMode (PIN_M1_DIRECTION_RV, salida);
pinMode (definir PIN_M1_SPEED, salida);
}
void loop() {}
analogWrite (PIN_M1_SPEED, 255);
digitalWrite (PIN_M1_DIRECTION_FW, alto);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, alto);
Delay(5000);
digitalWrite (PIN_M1_DIRECTION_FW, bajo);
digitalWrite (PIN_M1_DIRECTION_RV, bajo);
Delay(5000);
}
Ahora solo tienes que soldar el C.I. L298P (U1 en PCB), los 8 diodos 4004 (D1 a D8 en PCB), lo 4 10 k Ohm resistencia (R1 a R4 en PCB), los 4 leds de 5mm (L1 a L4 en el PCB) y el pin de 3 x 2 Tornillo Conector (VS, MOTOR y MOTOR_1 en PCB) en los lugares correctos, conectar todo y subir el código a la placa Arduino.







")





