

Primeras imágenes de lo que ha sido un trabajo en progreso durante 6 meses. La construcción es casi completa y 2015 es el año para centrarse en el lado de electrónica y programación.
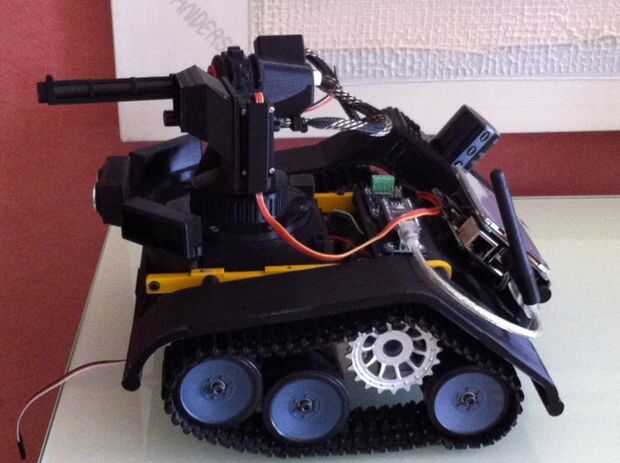
Pistola de bobina... Esto es lo que ha inspirado el tanque como cuando primero fue probado el coilgun estaba tan sorprendido por la energía que pensé que tendría que incorporar esto en algunas pistas. Dispara un lingote de acero de 20mmx6mm. Han tenido un número de prueba de incendios, que cobra a sobre 340VDC en unos 10 segundos y luego use un opto para disparar un SCR. Ahora todo encerrado me parece que es mucho más confiable y menos peligroso que tener la placa de circuito de alto voltaje de mentira alrededor de la mesa. Tiene un condensador de 1500uf relámpagos.
Pistas y motor han sido adquiridas de Hong Kong y el cuerpo sólo ha evolucionado con el tiempo.
La torreta tiene 2 servos, gyro, ultrasonidos y 2 IR distancia sesnors y la cámara.
El regulador del motor tiene un nano arduino conectado en la parte superior y ofrece PWM, dirección y amperios para las dos unidades. Los motores tienen unos sensores de velocidad de efecto hall del circuito como bien, que Im no está seguro cómo integrar esta función, arduino o raspberrypi.
La parte trasera de la unidad tiene un toushscreen raspberrypi y 3,2"+ un sensor de distancia infrarrojo.
Potencia: 2 11.3V 3300ma baterías en el tren de aterrizaje.
El sonido es sin embargo completarse sin embargo tiene un pequeño amplificador y un altavoz de 40mm que se imprimirán en un soporte para ver como un plato de satélite.
Ahora qué me compró aquí es que necesito ayuda del software de planificación del lado que quisiera que alguna entrada de aquellos que han hecho antes...
Objetivo del proyecto
Autónomo de búsqueda, encontrar un objetivo, apuntar y disparar. el objetivo podría ser simplemente un bloque de color en la primera instancia. También quisiera controlarlo todo a través de smartphone y algunos functons desde la pantalla táctil
Pensamientos hasta ahora:
Raspberrypi ejecutando el ampliado una firmado.
OpenCV para detección de objetos
Todo el código en python
El girocompás, que planeo usar para mantener el cañón recto cuando el tanque está viajando para arriba y abajo directo Conecte raspberrypi con servocontrol a través una firmado.
Aplicación para smartphone podría usar touchOSC, pero realmente me gustaría ver una imagen por streaming desde la cámara con rodamientos gama superpuestos sobre la imagen, quizás una página html personalizado servido directa de la RPi.
Mi mayor dilema en este momento es que realmente me gustaría usar un PID de velocidad para cada uno de los motores que tengo una velocidad de pulso, sin embargo entender una firmado no esta roto por lo que realmente permite. Creo sinceramente que la función de 2 motor PID debe pertenecer en el arduino y no el IPC. Como el tanque es aproximadamente 200 g más pesados en un lado realmente creo que necesito algunos baja velocidad nivel coincidentes por lo que hará un seguimiento directo.





")







