Paso 2: cableado
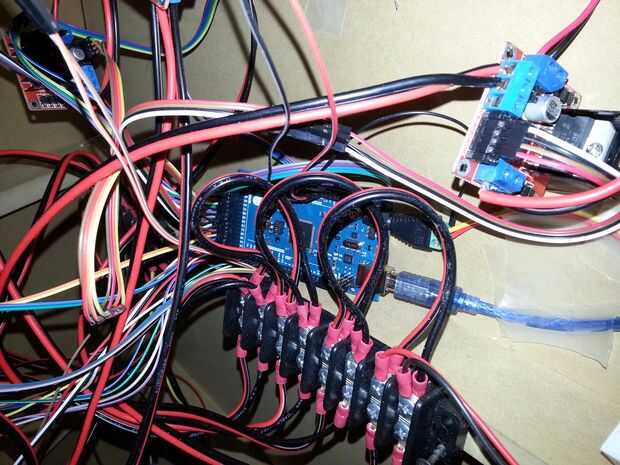
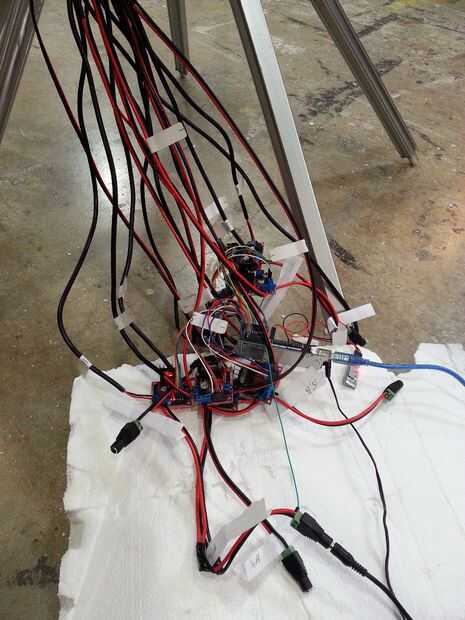
Una vez montado en su base, los cables de cada actuador se quedaron colgando hacia abajo de la abertura en la parte inferior.
Un adicional 18"- 24" del alambre se añadió a los cables provistos de cada actuador para proporcionar suficiente longitud para llegar a donde debía ser instalado en la base de Arduino.
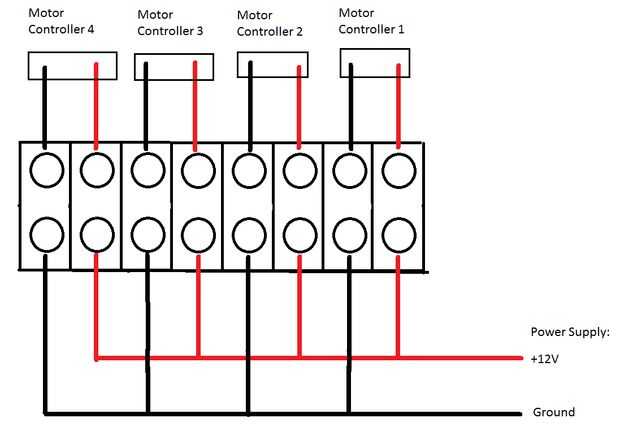
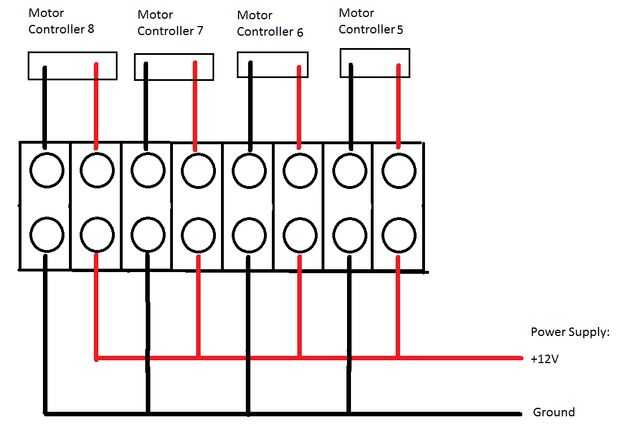
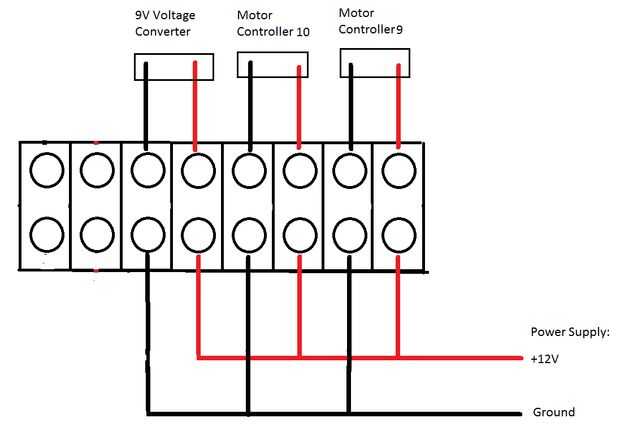
Para el cableado, la línea de salida de la fuente de alimentación fue conectada a un extremo de cada bloque de terminales.
Puentes fueron agregados a cada posición del bloque del terminal positivo para todas las otras posiciones y cada posición negativa.
Los cables positivos y negativos fueron conectados a cada regulador del motor.
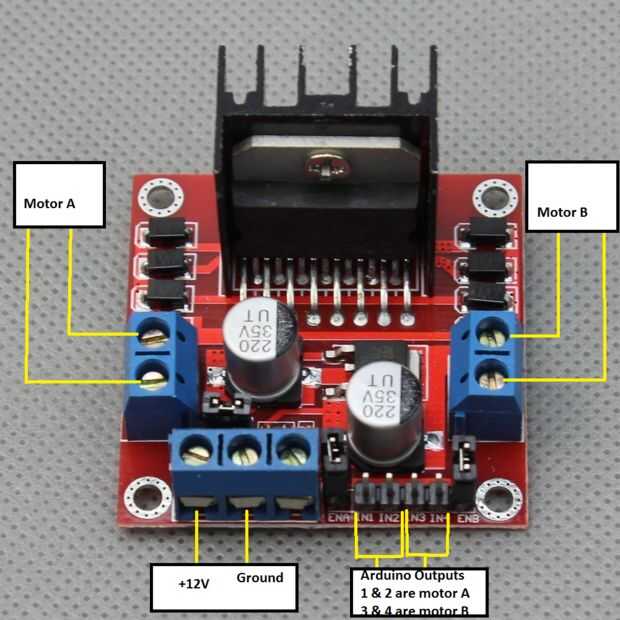
Cada regulador del motor puede controlar dos motores, conectar dos motores para cada controlador, uno a la cabecera en el lado izquierdo, uno a la cabecera en el lado derecho, las salidas para controlar cada motor están justo al lado del otro.
Las salidas digitales del Arduino conectan a los pines de encabezado del control motor. Dos salidas digitales son requeridos por el motor, este proyecto requiere 38 pines de I/O digitales para controlar totalmente.
Hacer nota de que salida digital del Arduino va a que controlador y que posición del regulador. Posiciones 1 y 2 en el controlador controlará el motor conectado a la izquierda, posiciones 3 y 4 de control del motor a la derecha.
Conecte el convertidor de voltaje por la hoja de datos correspondiente. Los 9V para alimentar el Arduino Mega poder. Un adaptador será útil o puede soldar los cables directamente.













