Paso 2: introducción
Convencionalmente, robots controlados por wireless utilizan circuitos RF, que tienen los inconvenientes de la gama de trabajo limitada, gama de frecuencia limitados y control limitado. Uso de un teléfono móvil para el control robótico puede superar estas limitaciones. Ofrece las ventajas de control robusto, tan grande como el área de cobertura del proveedor del servicio, sin interferencias con otros controladores y hasta doce de gama de trabajo. Aunque el aspecto y las capacidades de los robots varían enormemente, todos los robots comparten las características de una estructura mecánica, movible, bajo alguna forma de control. El control del robot consiste en tres fases: recepción, transformación y acción. Generalmente, los preceptores son sensores montados en el robot, procesamiento es realizado por el procesador o microcontrolador a bordo, y la tarea (acción) se realiza mediante motores o con algunos otros actuadores.
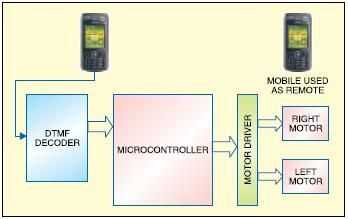
En este proyecto, el robot es controlado por un teléfono móvil que hace una llamada al teléfono móvil conectado al robot. En el curso de una llamada, si se presiona cualquier botón, se escuche un tono correspondiente al botón pulsado en el otro extremo de la llamada. Este tono se llama 'doble tono múltiple-frecuencia' tono (DTMF). El robot percibe este tono DTMF con la ayuda del teléfono apilado en el robot. El tono recibido es procesado por el microcontrolador ATmega16, con la ayuda del decodificador DTMF MT8870. El decodificador descodifica el tono DTMF en su equivalente dígito binario y este número binario se envía al microcontrolador. El microcontrolador es programado para tomar una decisión para cualquier entrada dada y salidas de su decisión de controladores de motor para conducir los motores para el movimiento hacia adelante o atrás o vuelta. El móvil que hace una llamada al teléfono móvil apilado en el robot actúa como un mando a distancia. Para que este proyecto robótico simple no requiere la construcción de unidades de transmisor y receptor. DTMF de señalización es usado fr teléfono señalización sobre la línea en la banda de frecuencia de voz al llamado Centro de conmutación. La versión de DTMF usado para marcar por tono de teléfono se conoce como ' Touch-tono.'DTMF asigna una frecuencia específica (que consiste en dos separatetones) a cada tecla para que fácilmente puede ser identificado por el circuito electrónico. La señal generada por el codificador DTMF es una suma algebraica directa, en tiempo real de las amplitudes de dos ondas seno (coseno) de diferentes frecuencias, es decir, pulsando el '5' enviará un tono añadiendo 1336 Hz y 770 Hz al otro extremo de la línea. Los tonos y los trabajos en un sistema DTMF se muestran en la tabla I.


")








