Paso 3: SCEMATIC de teléfono móvil operado Land Rover
DESCRIPCIÓN DEL CIRCUITO
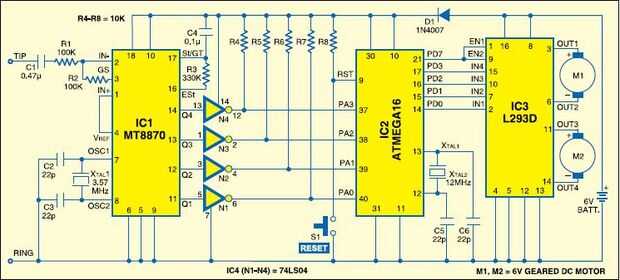
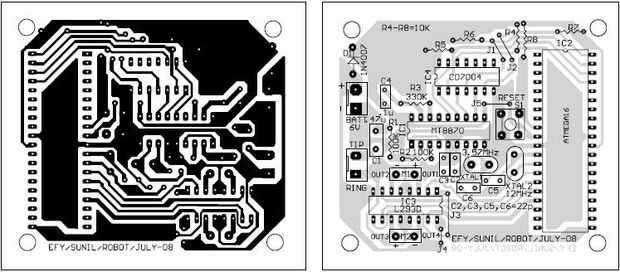
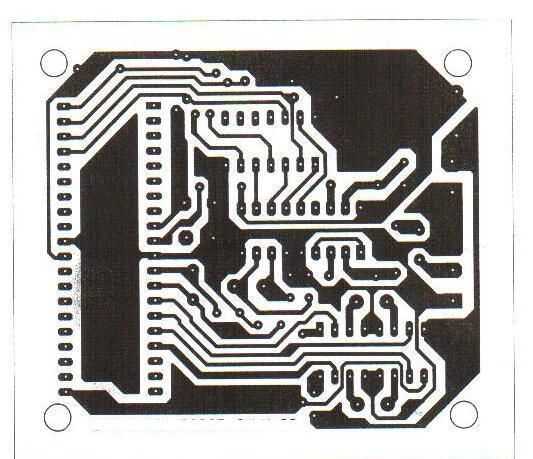
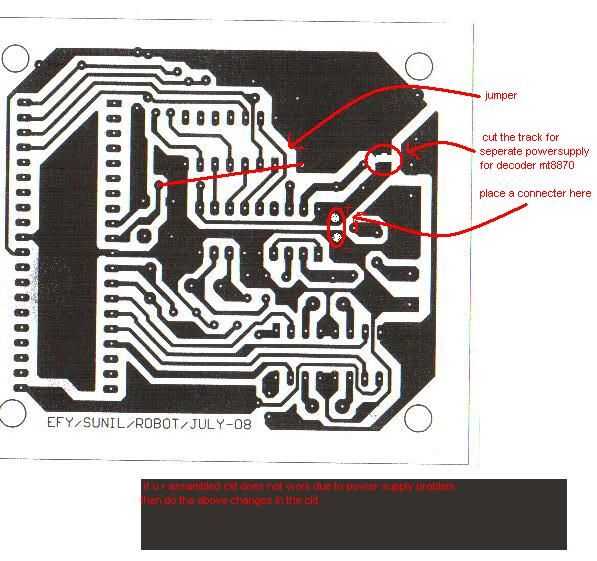
La figura 1 muestra el diagrama de bloques de la phoneoperated móvil basado en el microcontrolador land rover. Los componentes importantes de este rover están un decodificador DTMF, microcontrolador y controlador de motor. Aquí se utiliza una serie de MT8870 decoder DTMF. Todos los tipos de la serie MT8870 utilizan técnicas de conteo digitales para detectar y decodificar todos los 16 pares de tono DTMF en una salida de código de 4 bits. El circuito de rechazo de tono integrado elimina la necesidad de filtración previa. Cuando se reconoce la señal de entrada en el pin 2 (IN-) en la configuración de entrada balanceadas para ser eficaz, el 4-bit correcto decodificar señal del tono DTMF es transferido a Q1 (pin 11) a través de Q4 (pin 14) salidas. La tabla II muestra la tabla de salida datos DTMF del MT8870. Q1 a Q4 salidas del decodificador DTMF (IC1) están conectados a los pines del puerto PA0 mediante microcontrolador PA3 del ATmega16 (IC2) después de inversión por N1 a N4, respectivamente. El ATmega16 es a 8 bits de baja potencia, CMOS microcontrolador basado en el AVR mejorada arquitectura RISC. Proporciona las siguientes características: 16 kB de memoria de programa Flash programable en el sistema con capacidades de lectura tiempo de escritura, líneas de 512 bytes de EEPROM, 1kB SRAM, propósito general de 32 entrada/salida (E/S) y 32 registros de trabajo polivalente. Todos los 32 registros conectado directamente a la unidad aritmética lógica, permitiendo que dos registros independientes a consultarse en una sola instrucción ejecutada en ciclo de un reloj. La arquitectura resultante es más eficiente en el código. Salidas de pines del port PD0 PD3 y PD7 del microcontrolador se alimentación a las entradas IN1 a IN4 y permiten clavijas (EN1 y EN2) del controlador de motor L293D, respectivamente, para conducir dos motorreductores DC. Interruptor S1 se utiliza para rearme manual. La salida del microcontrolador no es suficiente para conducir los motores de DC, para que drivers de corriente se requiere para la rotación del motor. El L293D es un quad, alta corriente, mitad-H driver diseñado para proporcionar bidireccional corrientes de impulsión de hasta 600 mA en tensiones de 4.5V a 36V. Hace más fácil conducir los motores DC. El L293D se compone de cuatro conductores. Pasadores de PIN IN1 a IN4 OUT1 por OUT4 de entrada y salida, respectivamente, de 1 driver por driver 4. Conductores 1 y 2, drivers 3 y 4 están activadas por activar el pin 1 (EN1) y pin 9 (EN2), respectivamente. Cuando habilitar entrada EN1 (pin 1) es alto, están habilitados los controladores 1 y 2 y las salidas correspondientes a sus entradas están activas. Del mismo modo, permitir entrada EN2 (pin 9) permite drivers 3 y 4. Un tamaño real, solo lado PCB para teléfono móvil operado land rover se muestra en la figura 4 y su disposición de componentes en la figura 5.


")








