Paso 2: Paso 2: entender la comunicación serial
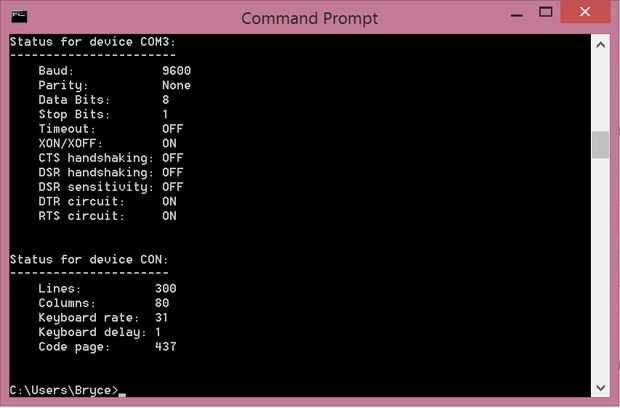
Hay recursos maravillosos en la comprensión de puertos serie. Aquí está la descripción básica. Un puerto serie es una forma sencilla para hablar con un microcontrolador con un ordenador. Usamos esto para contar los servos lo deben hacer. Para probar el puerto serie y nuestros servos utilizo masilla. Normalmente se utiliza para comunicaciones de red, pero desde windows habían quitado hyperterminal he vuelto a masilla. Si usas linux, me gusta gtkterm, se siente mucho como masilla. Desde este punto utilizo masilla. Antes de abrir la masilla deberás figura hacia fuera qué puerto está enchufado su VSP. Simplemente abra un símbolo del sistema escribiendo "cmd" en cualquiera de windows muchas opciones de búsqueda. En la ventana de comandos escriba "modo". Debe mostrar algo que parece la ventana de terminal se muestra. Note que este informa "COM3" pero ustedes pueden mostrar muchos. Yo simplemente desenchúfela y ver que uno desaparece y luego reaparece cuando la conecto en.
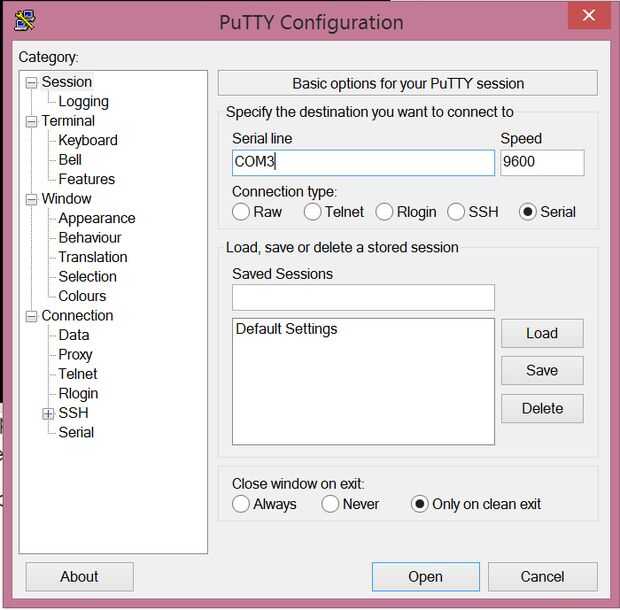
Ahora abra la masilla. Seleccione el botón "Serial" y modificar al puerto correcto. Usar una velocidad en baudios de 9600, así. Esto es específico para el código para el microcontrolador para no cambie. Una vez abierto, escriba lo siguiente:
#10010 &
Esto debe mover ambos servos direcciones opuestas. Los comandos que configurar son los siguientes
Primer carácter debe ser #
Segundo caracter es 0-4 (0-parada adelante 2-1-izquierda 3 derecha 4-atrás)
3 º a 7 º carácter es la duración de tiempo que va a mover las ruedas.
es de 8 caracteres y denota el final de la cadena. Si escribes algo mal, simplemente coloque un & y comenzar de nuevo.
Ahora debe tener un ordenador Controlando servos.

")



")


")


")

