Paso 2: configuración
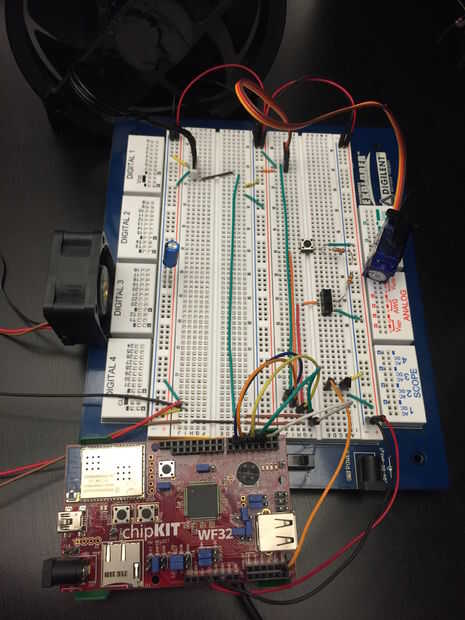
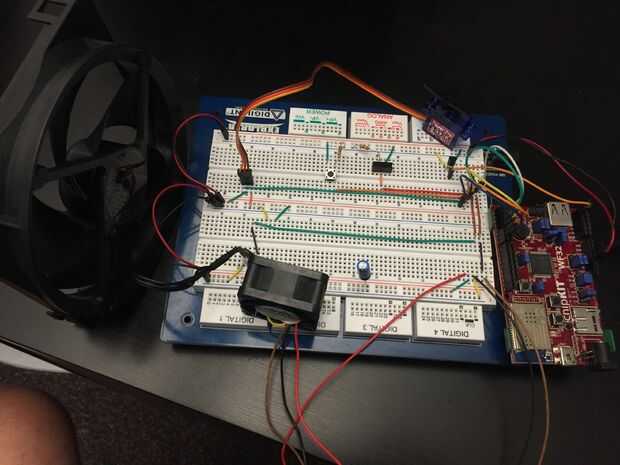

Conecte la alimentación y tierra a ambos lados de la placa. Colocar el pulsador en la placa y conecte un extremo a los 5V. En el otro lado del interruptor, conecte a tierra a través de un resistor de 240Ω. Conecte a este cruce para pin digital 5 en el WF32.
Siguiente paso es conectar el interruptor, primero coloque el interruptor de 3 clavija en la protoboard. A continuación ejecutar un cable de uno de los pasadores externos al poder y luego colocar un resistor de 240Ω entre los opuestos lados pin y tierra. Finalmente ejecute un alambre desde el pasador central para pin digital 4 la WF32.
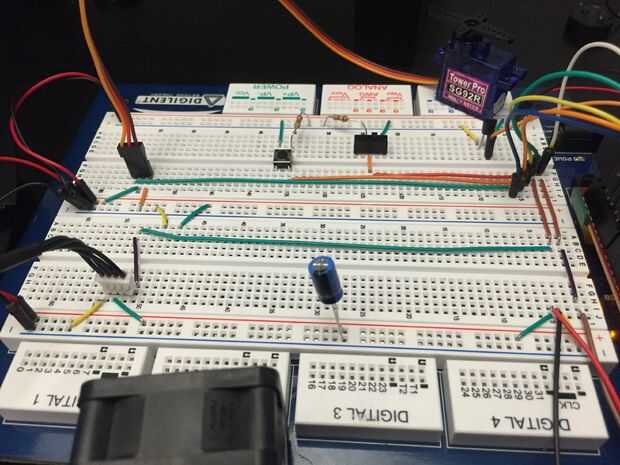
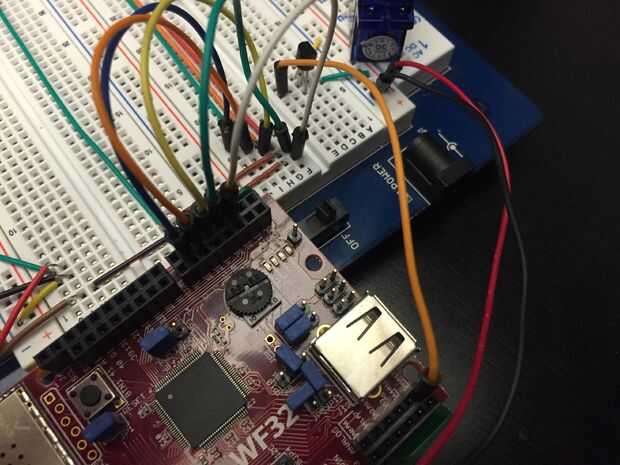
Ahora puede insertar encabezados de macho en las 3 o 4 tomas hembra el motor servo y los ventiladores (ver figura arriba para instrucciones de pin del ventilador). Para el servo Conecte el cable naranja al poder y el cable marrón a la tierra. Coloque un condensador electrolítico de 100uF en alimentación y tierra para alisar cualquier irregularidad en el voltaje. Conecte el cable de datos del servo (cable amarillo) a la clavija 6 en su WF32. Repita este procedimiento para cada uno de los 2 ventiladores que se conecta el cable de datos de uno al pin 2 y el otro al pin 3. Lugar la TMP36 en la protoboard (es importante el orden de los pines) Conecte el eje izquierdo del piso hacia el lado al poder y el eje derecho a tierra. Conectar el pasador central con Analog pin 1(A11) de la WF32.
")

")






")



