Paso 5: controles:

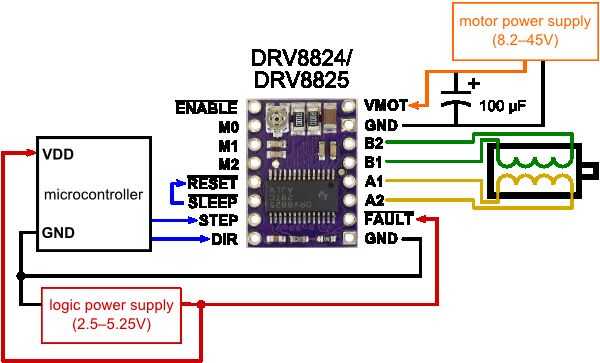


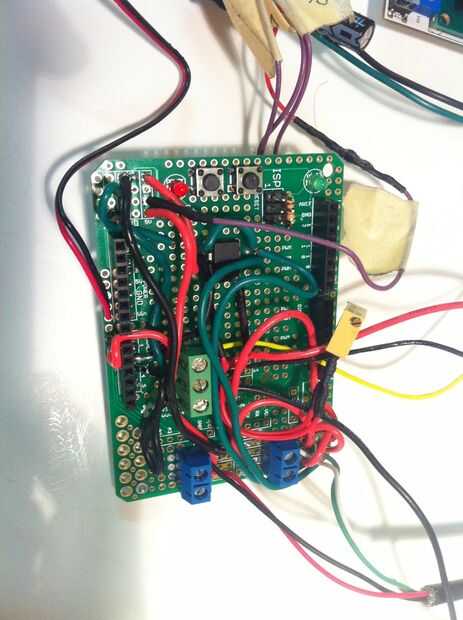

Ahora llegamos a lo que veo como la parte más difícil de este proyecto. El caso de la impresión es fácil, se unen los archivos de stl. Está gastando el tiempo de la soldadura de la protoboard sin cableado de Cruz algo y entender exactamente lo que está haciendo difícil. Hice un conjunto de diagramas de circuitos en las fotos que muestran exactamente cómo esta cosa es cableada.
-Programa: También es el programa de Arduino que contiene lo pretende ser suficientes comentarios para que sea un documento independiente. Soy ingeniero mecánico pero gusta pensar que mi capacidad de programación no es terrible. Ir a echar un vistazo, te esperaré.
Una peculiaridad interesante que aprendí acerca de la programación de Arduino de este proyecto es que llamar a 'serie print' es una función costosa de tiempo. Es por ello que TestrBot ejecuta más rápido en 'modo manual' que lo hace en el modo Auto Test, debido a que el paso a paso requiere literalmente cada paso a ser llamado individualmente, y no se puede llamar los pasos tan rápido cuando se utiliza su capacidad de procesamiento limitada para imprimir datos en serie.
.
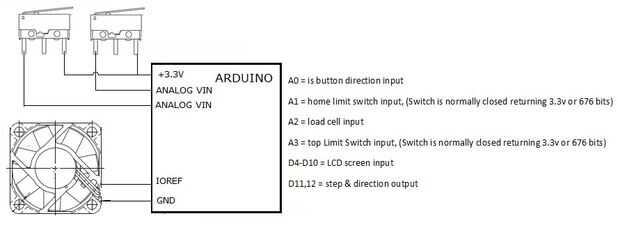
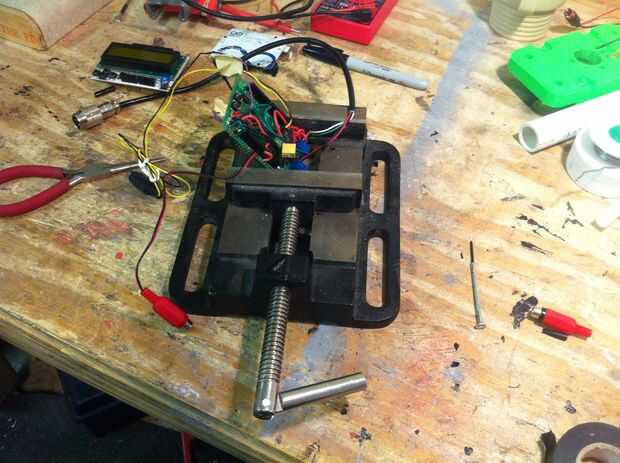
Desplazamiento: Si no fuera claro, TestrBot medidas de desplazamiento contando pasos individuales paso a paso. No hay nada de malo hacerlo siempre y cuando no sobrecargue su paso a paso hasta el punto de los pasos perdidos. Por el engranaje de la varilla roscada y los engranajes de plástico, los pasos 23 nema (200 pasos por revolución) hacen 6960 pasos viajar una pulgada vertical. Tiene una gran ventaja mecánica. Pensé que iría más rápido, pero no puedo llamar la función de ejecución lo suficientemente rápido como para que en la práctica sólo se mueve en aproximadamente.25 en / min máximo.
.
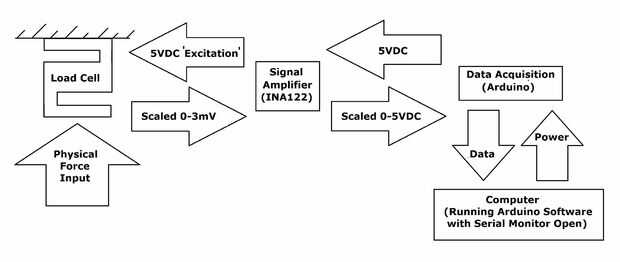
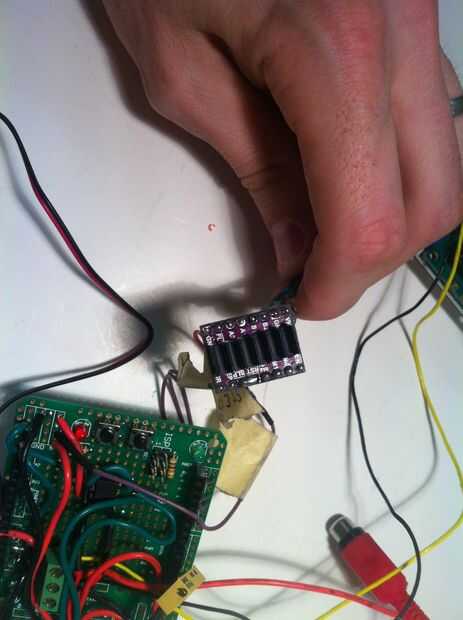
Celulas y amplificación de la señal: También trató de dar una breve explicación de cómo funciona la celda de carga en las fotos, pero realmente hay bastante información sobre el tema para justificar todo un Instructable (estar pendiente).
Por ahora aquí es suficiente info en términos peligrosos:
La celda de carga tiene 4 calibradores de tensión dentro de cableado en una configuración de puente de Wheatstone. Los calibradores de tensión se unen al metal de la celda de carga y cambian de resistencia cuando la celda de carga se deforma por cargas. Este cambio en la resistencia es demasiado pequeña para medir directamente con un multímetro. Eso es por qué utiliza un Wheatstone puente de circuito, que puede sentido cambios muy pequeños en resistencia midiendo el cambio en voltaje en lugar de otro.
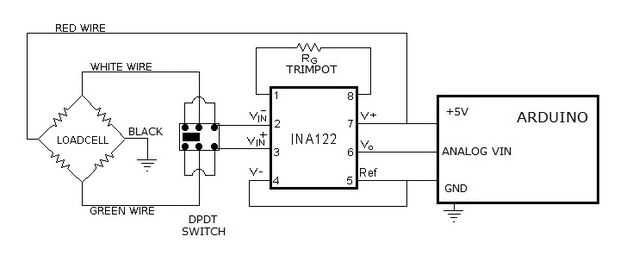
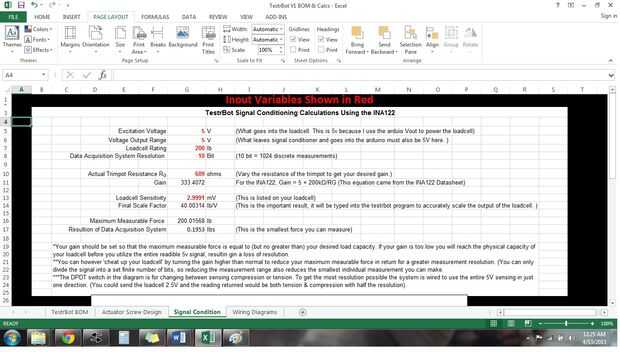
El amplificador es como un muy sensible-metro/ohm-voltímetro que escala hasta la señal Lee. Puede ser utilizado para cualquier puente de puente de wheatstone, RTD o termopar. En este caso el amplificador convierte ese voltaje pequeño (~ 3mv) medida en una tensión más grande escala entre 0-5VDC que puede ser leído por el equipo de adquisición de datos (el Arduino). Puede ajustar la cantidad exacta que escala hasta la señal (ganancia). En este caso se realizan ajustes con un multivuelta ajuste potenciómetro ya es cómo Texas Instruments diseñó este chip.
La ganancia deberá ajustarse para que la máxima fuerza medible es igual a (pero no mayor que) su capacidad de carga deseada. Si la ganancia es muy baja llegar a la capacidad física de la célula de carga antes de utilizar la señal de 5v puede leer entero, resultando en una pérdida de resolución. Ya que tengo una celda de carga de 200 libras, configurar la ganancia para que las fuerzas de 0 a 200 libras se escalan proporcionalmente de 0 a 5 VDC.
Nunca puede conseguir más de 200 libras de una célula de carga de 200 libras, sin embargo, usted puede 'engañar su señal' girando la ganancia superior a la normal para reducir su fuerza máxima medible a cambio de una mayor resolución de la medición. (Usted puede sólo dividir la señal en un número finito de bits (1024 bits aquí), así reduciendo la gama de la medida también reduce la medida individual más pequeño que puedes hacer.
La celda de carga está conectado a la función sólo en tensión o en compresión. Me podria enviar el loadcell 2.5V y la lectura devuelta sería de 0-2.5 en tensión y de 2.5-5 en caso de compresión, pero se perdería la mitad de la resolución de la medición. Como es, si no se puede cambiar entre la tensión y compresión, usando el interruptor DPDT en el diagrama.
Por cierto, la más pequeña fuerza TestrBot puede medir en una 10 bits Arduino es.195 libras (que es de 200 libras divididos por 2 ^ 10 mediciones discretas)








")




