Paso 3: El marco

Para hacer un buen marco que es necesario utilizar los elementos más ligeros como sea posible. Para nuestro robot Pi, hemos tenido que construir con elementos de reciclaje para nuestro marco es un poco pesado pero de todos modos no importa para nuestros motores.
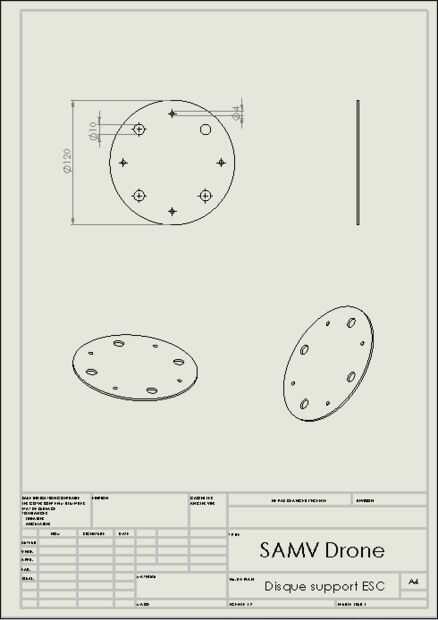
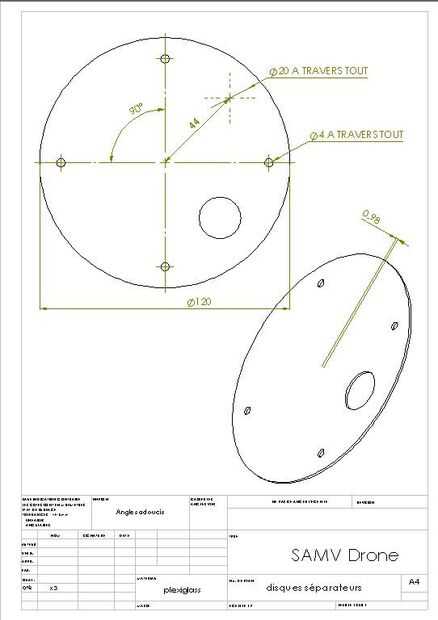
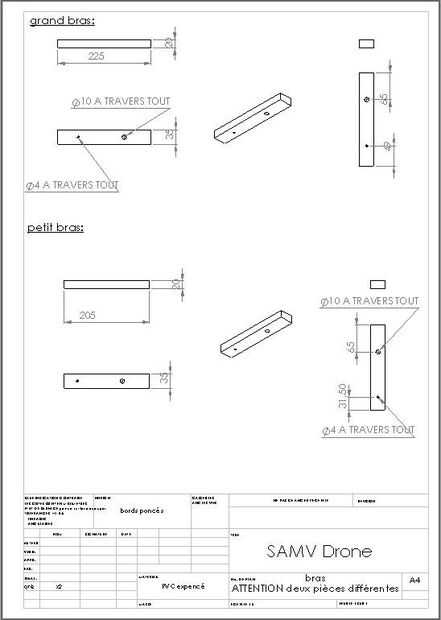
El diámetro del bastidor es 0, 45m porque queríamos un quadcopter"estable" para la cámara y no un "quadcopter de carreras". En el centro de la X son 3 niveles (quizás 4 en el futuro) para los controladores, los CES y nuestra batería (tiene todas las citas en los cuadros en la parte superior de la página).
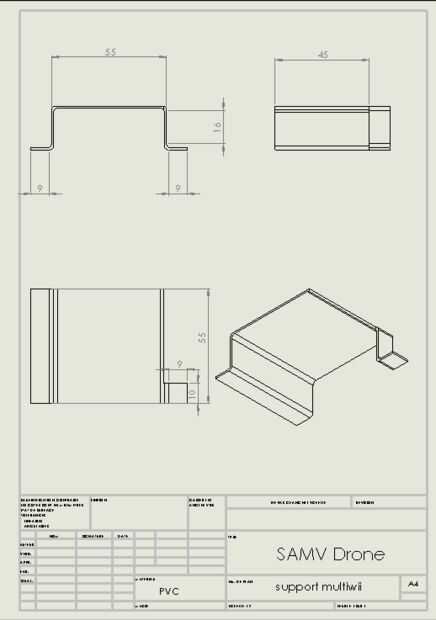
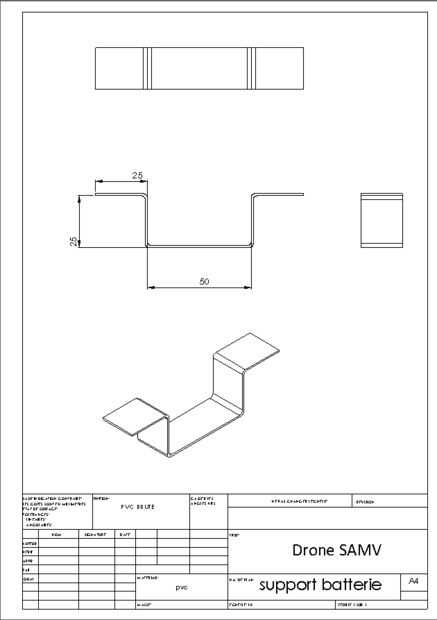
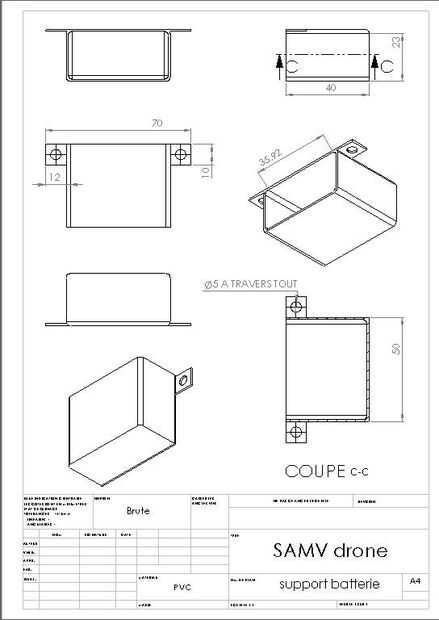
Hemos creado una plataforma para el multiwii en la parte superior de la quadcopter(picture 2) y otra a la batería (imagen 7 y 8) en la parte inferior de lo quadcopter. Para plataforma de Multiwii, hemos querido poner la frambuesa en el multiwii porque hay algunas conexiones entre ellos. Para la plataforma de la batería, hemos querido tomar o sacar la batería para cargarla. Todo cuadro está en el siguiente paso...
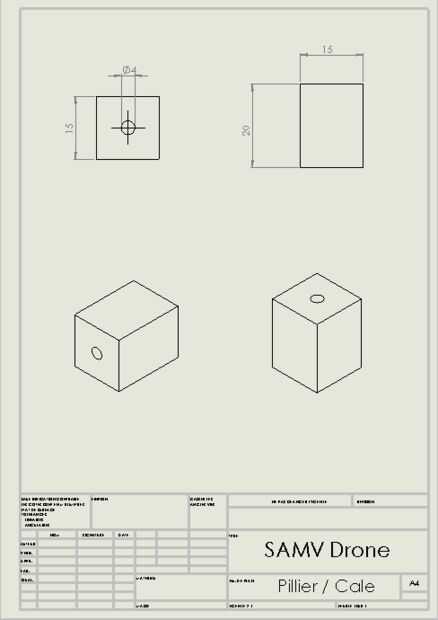
Por último, ponemos 4 pies para el quadcopter poder aterriza pero no son bonitos y malos.


 Drone...")







")


