Paso 4: Soldar el circuito controlador de Motor
Puesto que la corriente de salida de linkit el pin digital es demasiado baja para un motor de accionamiento, tienes que tener un conductor del motor externo para mover a tu robot. Ahora directamente o bien puede pedir un escudo de controlador de motor para tu trabajo pero aumentan sus cuentas o usted puede hacer su propio controlador de motor, como lo hice.
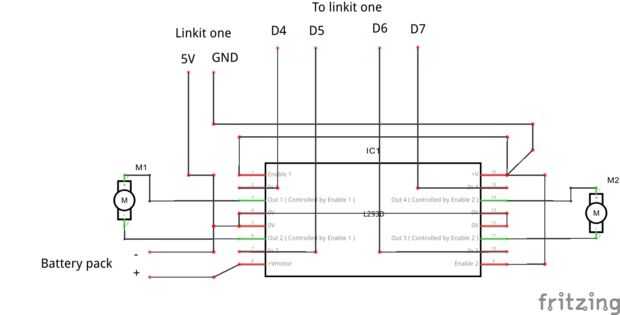
El circuito que hice usa L293d. El papel de este IC es recibir señales de linkit uno y los motores por consiguiente. Deberá hacerse constar que necesita utilizar otra batería aparte de la un batería linkit para alimentar los motores porque la batería de litio es demasiado débil para realizar esta tarea.
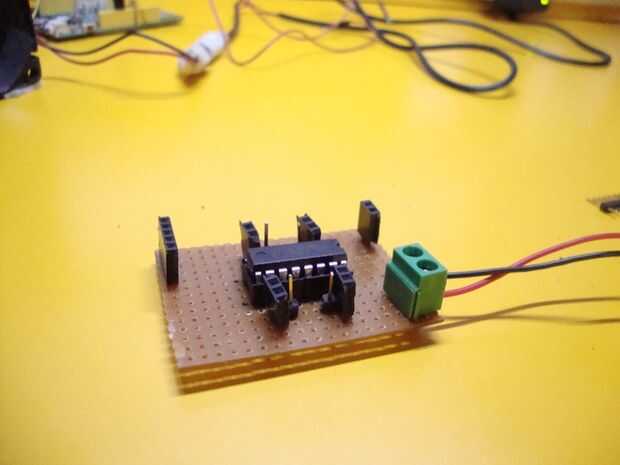
Siga el esquema dado arriba para el circuito de la soldadura. Me han agregado algunos encabezados de machos, hembra y tornillo terminales con facilidad todas las conexiones sin necesidad de soldar todo permanentemente. Utilizar un zócalo del IC al L293d para evitar el sobrecalentamiento de la IC.













