Paso 7: Añadir los sensores de la mano





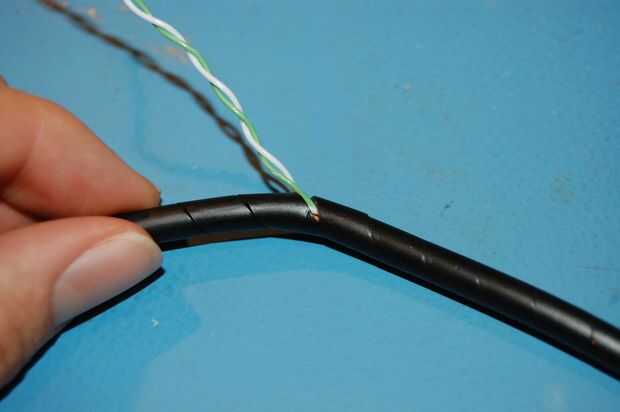




Comience ejecutando una longitud de alambre de envoltura desde una "muñeca" a la otra, directamente a través del cuerpo del robot. Si usas tubería necesita un orificio de acceso al medio para pasar los alambres a través de la cabeza. La envoltura de alambre se puede abrir en cualquier momento, por lo que no es necesario ningún agujero. A continuación, ejecute una misma longitud de cable sólido de calibre 14 a través de la envoltura del cable. Esto hace que los brazos diferentes poses. Acabado de los extremos del alambre por doblar detrás en sí mismos, para evitar que el cable empujando a través de la tela.
Cada mano obtiene su propio sensor (o utilizar una si lo desea). Pegue el sensor en la almohadilla en la palma de la mano de blanco y esperar a que el pegamento se seque. Cosas de la mano con relleno.
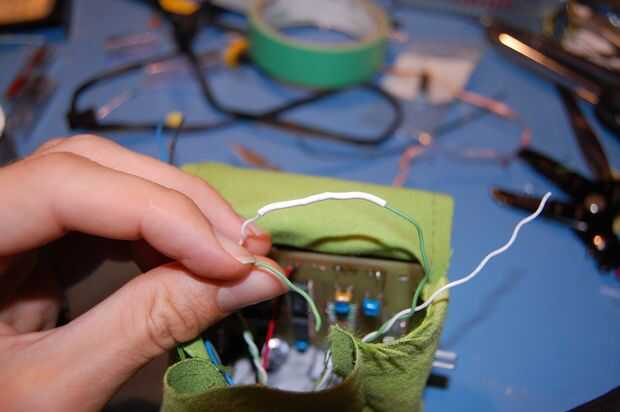
Ejecute los cables de un lado a través del alambre envuelven el tubo al cuerpo del robot, para que el cable salga a través de la envoltura del cable dentro del cuerpo. Tire de los cables desde el extremo del cuerpo hasta que la mano esté alineada con la "muñeca". Luego coser con cuidado la mano en el brazo. Hacer lo mismo con la otra mano.
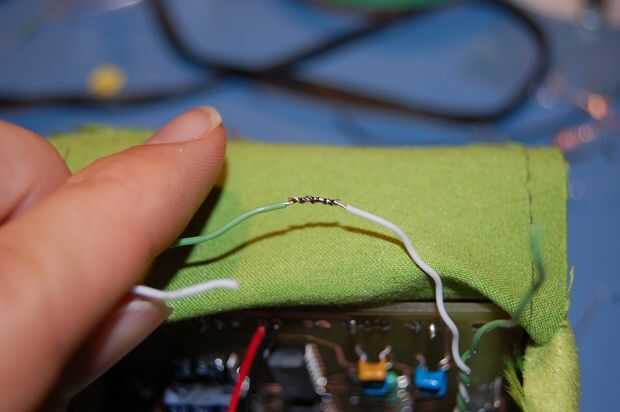
Elija cualquier uno cable en cada mano y soldar los extremos entre sí. Acabado con encogimiento del calor. Esto formará un circuito en serie entre las fotocélulas. Los otros dos cables serán soldados a la placa en la cabeza del robot.













