Paso 3: Poner todo junto
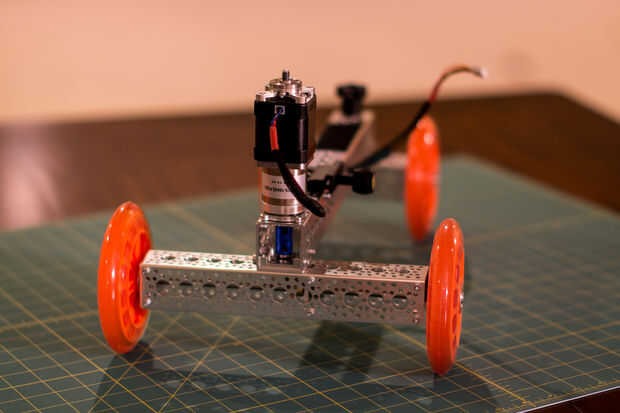
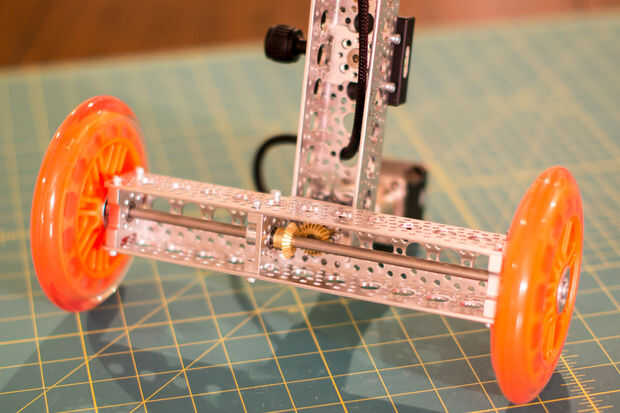
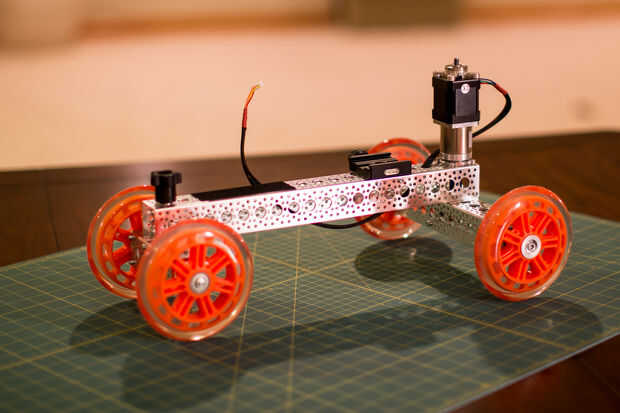





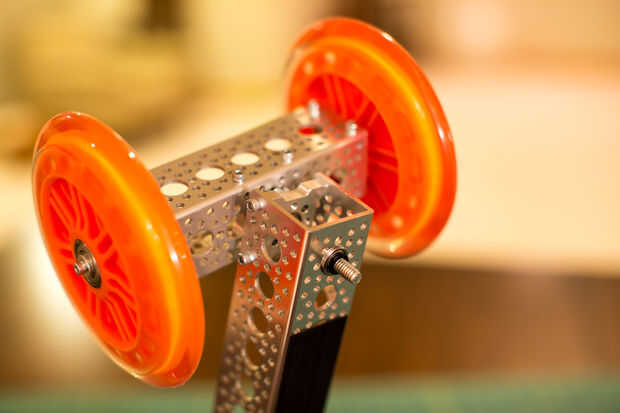
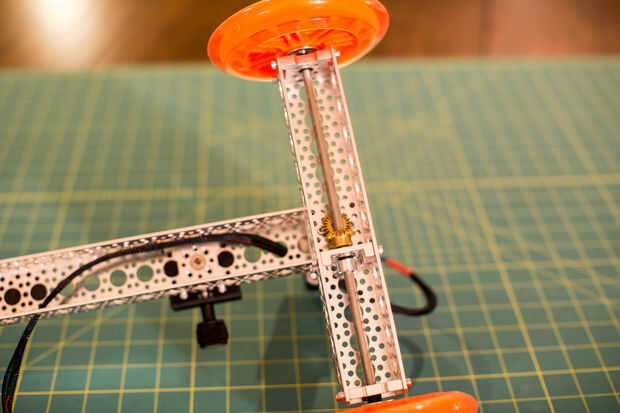
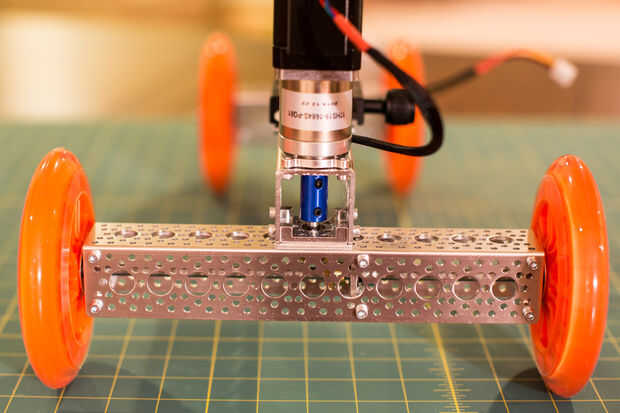
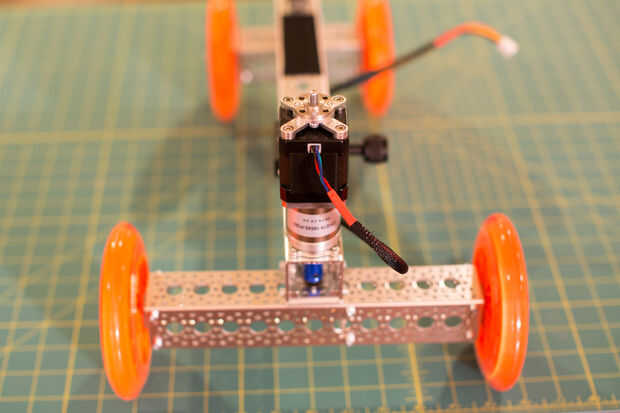
No voy a entrar en demasiados detalles sobre cómo reuní al rover como las fotos deben mostrar el diseño. Básicamente, el motor paso a paso, montado con un montaje de motor de engranajes planetarios, se conecta a un eje d con el 8mm al acoplador de 6,35 mm, que conecta con el engranaje cónico. Este equipo es lo que convierte la parte trasera D-eje y las ruedas. La mayor diferencia en este rover versus el diseño original es la forma en que está montado el motor paso a paso. En el explorador de la versión 1, el motor se instala debajo del canal principal perpendicular al eje trasero. En esta versión, yo solo había montado verticalmente en el eje trasero, reduciendo la tensión en el eje. Puesto que no es nada en el camino, probablemente tiene más sentido que el motor montado de esta manera.
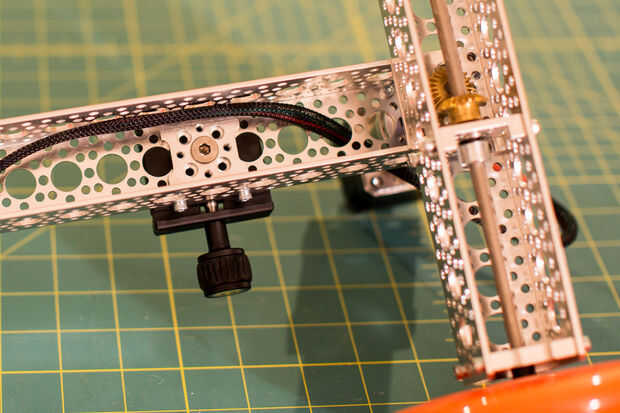
El eje delantero puede girarse a diversos ángulos para hacer el arco de rover como viaja y ajustar con la perilla de tensión. EMotimo Tb3 está conectado a la rover con la Arca swiss placa y adaptador. Usted podría unir el TB3 usando una conexión directa, pero siendo capaces de tomar y sin herramientas es conveniente... La batería está insertada usando el velcro simple.
Permítanme indicar también que probablemente no tienes que tener las ruedas de patín más grandes. 2,975" ruedas probablemente funcionar bien y bajar un poco el rover de la tierra. Sólo me gustó el aspecto de las ruedas más grandes, así que allí no es ninguna ventaja que de lo que puedo asumir.
Si usted compra sus motores paso a paso directamente de eMotimo, no tienes que conectar el motor mediante el conector molex. Puesto que quería motores diferentes de lo que venden en eMotimo, necesitaba soldar y alambre el motor yo mismo. Aquí es necesario completar esta el diagrama de cableado:
- Negro Motor -> puente negro
- Green Motor -> puente rojo
- Motor azul -> puente naranja
- Rojo Motor -> puente amarillo




")






