











Este instructable fue creado en cumplimiento de la exigencia de proyecto de la Makecourse de la Universidad de South Florida (www.makecourse.com).
Este proyecto, Haciendo las manos, es una recreación de m.c. dibujo manos. En lugar de grafito dibujo como se ve en la foto, he creado una escultura de dos manos robóticas caprichosamente fijación ellos mismos.
Materiales:
-Arduino Uno junta
-las conexiones del alambre
-Sensor de proximidad (HCRS04)
-Motor servo micro
-9 voltios Batería (o fuente de alimentación opcional) y caja de las pilas
-caja (yo usé casilla por curso)
-modificado de Plexiglas
-moldes de silicona de las manos con esqueleto de alambre de metal junto con otro molde de fabricación de materiales
-2 destornilladores
-tornillos
-cuerdas (yo usé cuerdas coser "invisible")
-3D cog impreso (he incluido el archivo)
-diversos cables para fines estéticos (como se ve que sale de las muñecas)
Las manos de moldeo :
materiales: 2 kits de seguridad de alga con agua tibia, dragón piel silicona silc-cerdo marca del silicón del pigmento, dos botellas de 2 litros, cuarto pulgada alambre de metal, mezcla de utensilios y tazón de fuente grande.
He comprado mi molde que hace fuentes en http://www.smooth-on.com/
(¡ tienen un descuento de estudiante si usted ordena por teléfono!)
Tienen videos muy útiles, como el utiliza para la dirección aquí:
En primer lugar, ya que usted es más probable que va a moldear sus propias manos, usted estaría mejor con un asistente como fabricación del molde es una manera oportuna.
-Antes de empezar, hacer 2 esqueletos de metal simple fuera el cuarto pulgada del alambre de metal. El esqueleto debe ser por lo menos en el dedo pulgar y dedo de puntero en los mismos huesos de distancia sería desde la muñeca hacia abajo de los dedos. Esto permite que las manos sujetar el destornillador por sí mismos. Guardar para más tarde después de haber creado la negativa con la alja-caja de seguridad, y antes de verter la silicona.
-Preparar dos juegos de los cables que quieres sobresalir de la muñeca. Se puede utilizar aproximadamente 5" de los alambres de cualquier desecho que tengas en casa. Era exigente y había seleccionado mis cables en Lowe según color y tamaño. Estos se pondrán en la negativa después de que el esqueleto se ha colocado.
-En primer lugar, cortar unos 4 pulgadas fuera de las tapas de las botellas de litro (como se ve en la foto) y reciclar la pieza superior.
-Entonces, preparar partes iguales de agua tibia y alja-caja de seguridad. Con agua tibia en un tazón grande, simultáneamente la mezcla y vierta la alja-caja de seguridad en el agua caliente. Mezclar rápidamente y a fondo tratando de no añadir burbujas a la mezcla hasta que el polvo se haya disuelto completamente. ACTUAR CON RAPIDEZ! Alja-safe se seca dentro de los primeros 5 minutos así que ten cuidado.
-Enjuagar la mano se utilizan para el molde con agua y coloque la mano en la posición deseada en la botella de litro y Vierta lentamente la mezcla alga-caja fuerte, manteniendo su mano en la misma posición. Dejar secar durante 10 minutos. Mantenga todavía!
-Mover la mano de molde. Ser suave y centrarse en permitiendo que el aire en el molde para liberar la succión. Ahora tienes el negativo de su molde.
-Colocar el esqueleto metálico interior negativo donde es anatómicamente correcto.
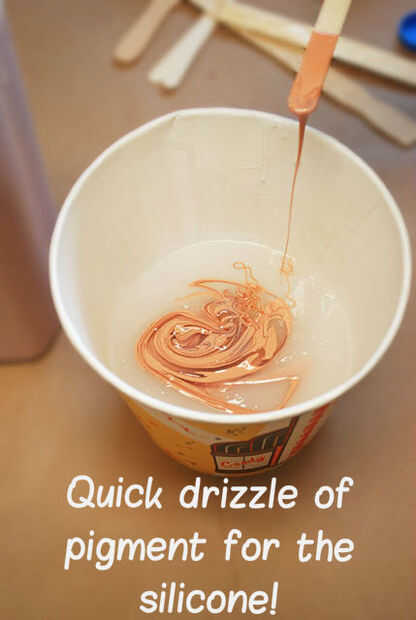
-Mezclar partes iguales de piel de dragón de la parte A y parte B y un chorro rápido de pigmento de la carne de cerdo silc bien hasta que quede todo un color sólido. Tenga cuidado de no crear burbujas. Vierte la silicona en el negativo, pulse y gire el molde el prevenir cualquier burbujas de estar en su molde. Burbujas crean imperfecciones en el molde. Dejar secar por lo menos una hora estar seguro.
-Luego, desmenuzar el molde de un solo uso fuera con las manos y quitar las manos de silicona.
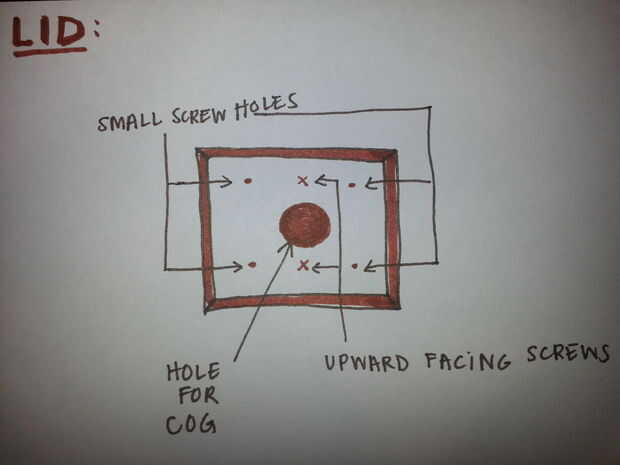
Montaje: Coloque todos los componentes dentro de la caja y montar el motor del servo en el centro de la base de la caja con epoxi y dejar secar. Luego, conecte el centro de la parte inferior del impreso cog al motor servo con los tornillos pequeños que debe haber con el servo como equipo de montaje. Para la tapa de plexiglás, enrutados hacia fuera un círculo para mi cog impresa en y ángulo de los bordes en un ángulo de 45 grados para la estética y el avellanado cuatro agujeros perforados los tornillos que sujetan la tapa a la caja. Antes de enroscar la tapa, perforar dos tornillos en la tapa de manera que se enfrentan a hacia arriba al cerrar la tapa. La colocación de los tornillos debe ser el punto medio entre la corona y la parte superior y la corona y la parte inferior si estaban sujetando la caja con el lado largo horizontal. Bosquejo de la vista de la tapa para evitar la confusión.
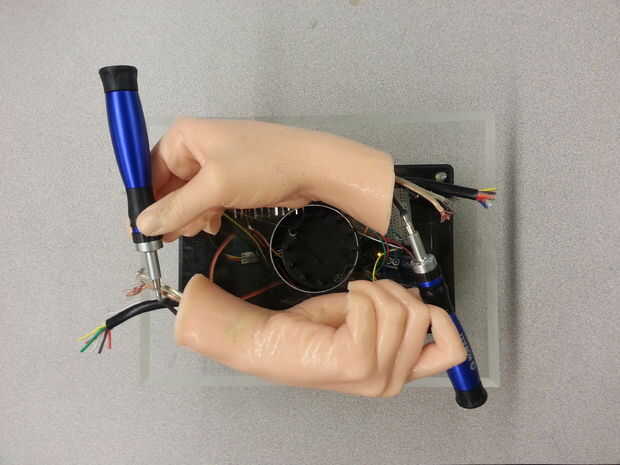
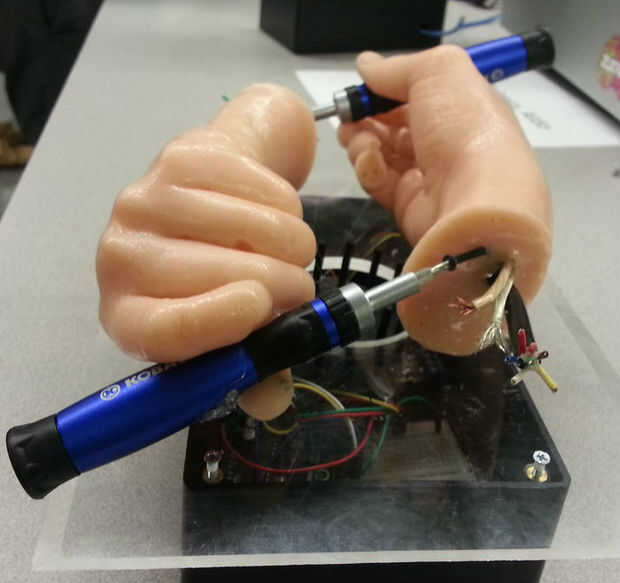
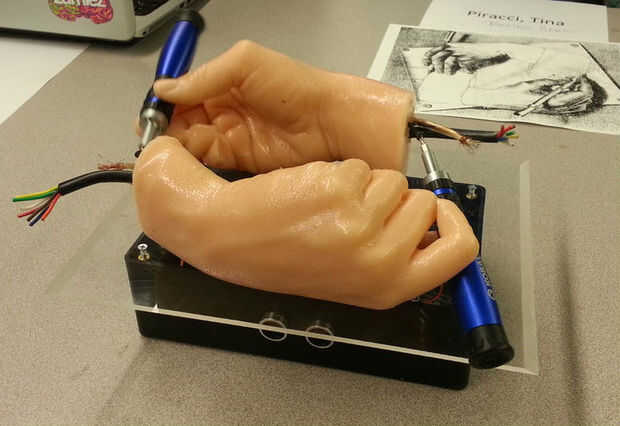
Entonces, para colocar las manos sobre la tapa, usted debe primero pre-perforar un agujero en la mano que es ligeramente más pequeña que el diámetro de los tornillos de la tapa. La ubicación de la el orificio puede variar dependiendo de su molde de la mano, pero para determinar la ubicación, colocar las manos encima de los tornillos de diferentes maneras para lograr el posicionamiento mismo como se ve en la foto del producto final. Asegúrese de que la colocación no toque su corona impresa, ya impediría el movimiento. Una vez que los agujeros han sido perforados, empuje agresivamente el tornillo en la perforación de las manos de un fuerte ajuste. Este tipo de accesorio permite la silicona ser más libre con su movimiento mientras que aún permanecen en su lugar.
Ahora, fije dos cadenas separadas a lados opuestos de la corona en cualquier dado varilla con un extremo conectado a la varilla y el otro alrededor de los dedos de la mano. Una vez más, dependiendo de su molde de la mano, colocación de las cuerdas variará, pero se van a querer pegarlas en alguna parte alrededor de los dedos de cualquiera envolviéndolo alrededor de los dedos, o enhebrar una aguja y coser a través de los dedos. Por ejemplo, en mi pieza, una de las manos fue cosida y uno fue envuelto.
Con los esqueletos de alambre, ahora debe ser capaz de simplemente colocar los destornilladores en las manos.
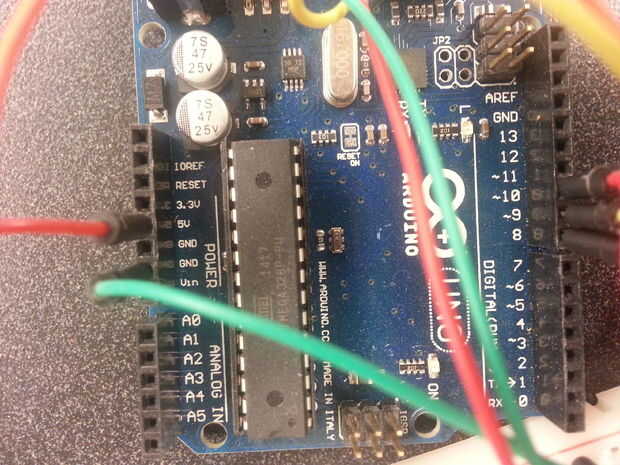
Configura la placa Arduino:
Codificación: Ver adjunto archivo el nombre MakinghandscodeFinal
Esquema de circuito:
Configuración de pines:
HCSR04: Programar para cuando el objeto está a 5 pies
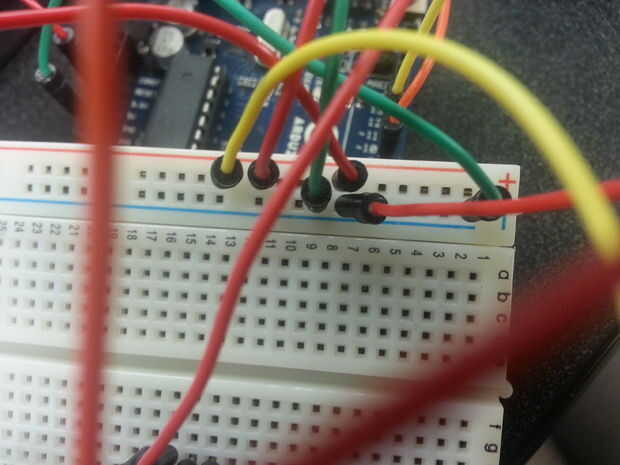
GND--> negativa colocación en protoboard y 5V de la placa Arduino
Eco--> pin 8 en Arduino
Trig--> colocación positiva en protoboard
VCC--> pin ~ 10 en Arduino
Motor servo micro: programado para rápidamente girar 180 grados hacia la derecha y luego de vuelta hacia la izquierda 180 grados infinitamente cuando se activa el sensor de proximidad.
(1) Tierra--> negativa colocación en protoboard y tierra en Arduino
(2) potencia--> colocación positiva en el protoboard
(3) datos--> pin ~ 9 de Arduino
Ver fotos de esclarecimiento.
Archivo de la corona de impreso: ver archivo adjunto llamado cog.ipt
Esta corona fue construir en Autodesk inventor y en impreso con plástico ABS negroSi su interesado más de mis proyectos de arte, no dude de mi sitio web en www.tinapiracci.com
¡ Gracias!
")












