Paso 6: Amo las neuronas para Robots
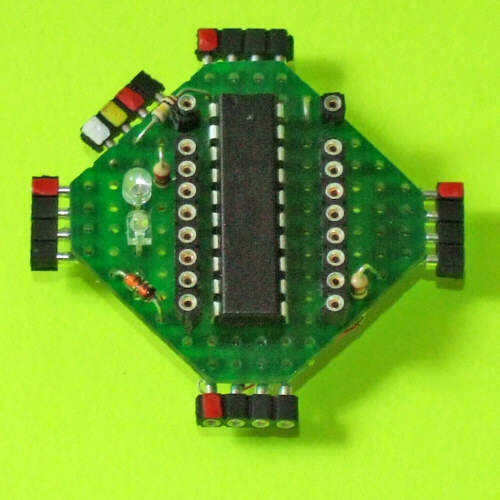
La neurona el código
El código real de una neurona principal depende del robot que se controla. Mi primer uso del mundo real es usando tinkertrons para controlar un controlador de robot de músculo de aire. Para obtener más información sobre cómo el regulador, ver aquí:
Aquí está el código usado en la neurona principal de la unidad de control de músculo de aire que controla dos neuronas del activador:
neurona principal de 20 m 2
B1 = 1
PAUSE 100
serout c.0,t4800,(1,11) ' entrada libre
pausa de 40
serout c.0,t4800,(1,11) ' entrada libre
pausa de 40
serout c.1,t2400,(170,9,$0C,127) ' m1 24-127, 84-2/3 velocidad de reloj
PAUSE 100
Loop1:
bajo c.7
' debug b1
IRIN [1000,loop1],b.5, b6
Si b6 = 0 entonces send1 ' button1 = 0
Si b6 = 1 then send2
Si b6 = 2 entonces send3
Si b6 = 3 entonces send4
Si b6 = 4 entonces send5
Si b6 = 5 entonces send6
Si b6 = 6 entonces send7
Si b6 = 7 entonces send8
Si b6 = 8 entonces send9
Si b6 = 9 entonces send10
Si b6 = 59 entonces send11 ' (-)
Si b6 = 11 then send12 ' entrar
Si b6 = 14 then send13 ' guía
Si b6 = 21 then send14 ' energía
Si b6 = 16 entonces send16 ' ch +
Si b6 = 17 entonces send17 ' ch -
Si b6 = 116 entonces send116 ' nuevo
Si b6 = 117 entonces send117 ' c
Si b6 = 52 entonces send52 ' izquierdo
Si b6 = 51 entonces send51 ' derecho
Si b6 = 18 entonces sec1 ' brazo hacia abajo
Si b6 = 19 entonces seq1rev ' brazo inversa hacia abajo
Goto loop1
SEND1:
' serout c.0,t4800,(1,13) ' guía
' pausa de 40
serout c.0,t4800,(1,1) ' enviar 1 byte 1, como calificador de
pausa de 40
Goto loop1
send2:
serout c.0,t4800,(1,2)
pausa de 40
Goto loop1
send3:
serout c.0,t4800,(1,3)
pausa de 40
Goto loop1
send4:
serout c.0,t4800,(1,4)
pausa de 40
Goto loop1
send5:
serout c.0,t4800,(1,5)
pausa de 40
Goto loop1
send6:
serout c.0,t4800,(1,6)
pausa de 40
Goto loop1
send7:
serout c.0,t4800,(1,7)
pausa de 40
Goto loop1
send8:
serout c.0,t4800,(1,8)
pausa de 40
Goto loop1
send9:
serout c.0,t4800,(1,9)
pausa de 40
Goto loop1
send10:
serout c.0,t4800,(1,10)
pausa de 40
Goto loop1
send11: ' (-)
serout c.0,t4800,(1,11)
pausa de 40
Goto loop1
send12: ' entrar
serout c.0,t4800,(1,12)
pausa de 40
Goto loop1
send13: ' Guía de
serout c.0,t4800,(1,13)
pausa de 40
Goto loop1
send14: ' poder enviar 21
serout c.0,t4800,(1,21) ' enviar 21
pausa de 40
Goto loop1
send16: '
serout c.0,t4800,(1,16)
pausa de 40
Goto loop1
send17: '
serout c.0,t4800,(1,17)
pausa de 40
Goto loop1
send116: '
serout c.0,t4800,(1,116)
pausa de 40
Goto loop1
send117: '
serout c.0,t4800,(1,117)
pausa de 40
Goto loop1
send52: '
serout c.0,t4800,(1,52)
pausa de 40
Goto loop1
send51: '
serout c.0,t4800,(1,51)
pausa de 40
Goto loop1
sec1: '
serout c.0,t4800,(1,18)
pausa de 40
Goto loop1
seq1rev: '
serout c.0,t4800,(1,19)
pausa de 40
Goto loop1











")

