Paso 11: calibración
El robot necesita una calibración antes de ser utilizada.
Abra el dibujo de "ANN.ino". En el "config.h", quite el comentario de la declaración de "#define calibrar". Apague el robot antes de subir el sketch.
Asegúrese de que ningún obstáculo alrededor del robot cuando energía encendido. Cuando el primer calibrado, el robot a avanzar un poco. Entonces se calibrará el sensor frontal. El robot se moverá hacia adelante hasta que encuentren con un obstáculo. Aquí se moverá hacia adelante y hacia atrás a juzgar la distancia. Después de él será calibrar los sensores de lado. Gire a la derecha y ajustar el balance entre el sensor girando a izquierda y derecho.
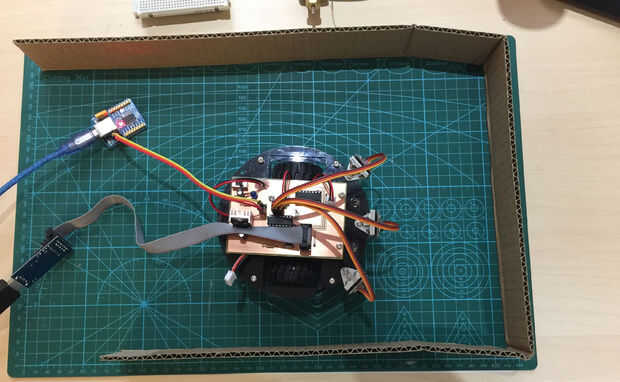
Por favor ver el video y las fotos para realizar la calibración. Como se puede ver en el vídeo y fotos, usé un rig de cartón para construir un recinto para realizar la calibración.

")



")







