Paso 2: Electrónica: construcción de la placa base
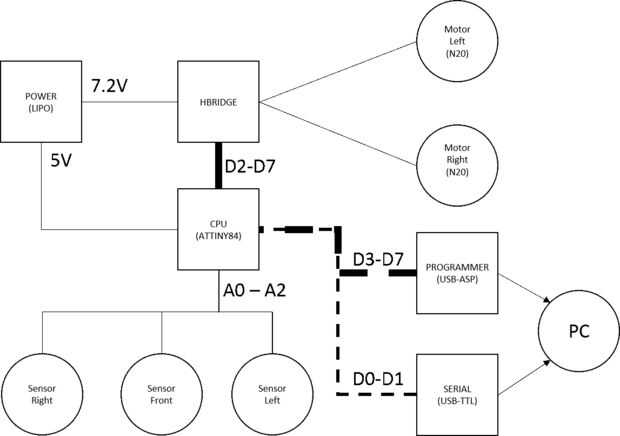


La placa base cuenta con un chip de ATTINY84A. Elijo este ATTINY porque tiene 8Kb de memoria y suficiente pines digitales para los sensores y el controlador del motor. Esta placa base tiene un botón de reset y un programador del conector (J1) usando el protocolo SPI (SLT, MOSI, MISO, CLK). 3 pines (J2, J3, J4) se utilizan como entrada analógica para sensores, 2 pernos (J5, J6) como entradas/salidas digitales y los otros pines se conectan a un L293D para dos motores N20. Te invito a buscar en Instructables.com sobre ATTINY. Hay muchos indestructible sobre cómo usar y programar ATTINY y arduino.
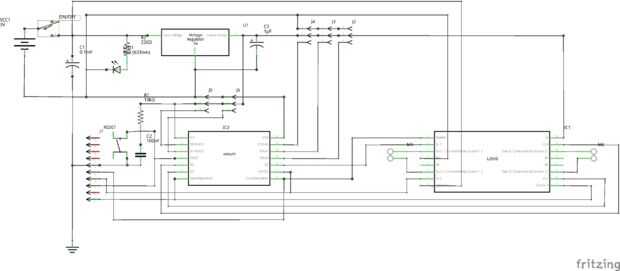
Adjunto los archivos de Fritzing que contienen las dos capas de este PCB. La capa superior contiene solamente algunas conexiones con via. Ellos pueden reemplazarse por cables para quién prefiere hacer un PCB "una capa". Usé el método de transferencia de tóner (otra vez Instructables.com es tu amigo). Para alinear las 2 capas, perforé 2 a cada lado del PCB antes de la transferencia. Con la ayuda de estos 2 pins me intercala el PCB con papeles brillantes (uno para la capa superior (espejo), una para la capa inferior) y alimenta a una máquina que lamina. Después del grabado, el resultado fue muy aceptable.
IMPORTANTE: Triple verificar todas las pistas de cobre; con un multímetro verifica corto circuitos o pistas descontinuadas.
Después de soldar la vía, protegido la capa superior cobre utilizando un spray protector transparente. Después de soldar los componentes, usé el mismo spray para proteger la capa de fondo cobre. También usé pegamento caliente en la base de los alambres para reforzar sus fuerzas mecánicas.
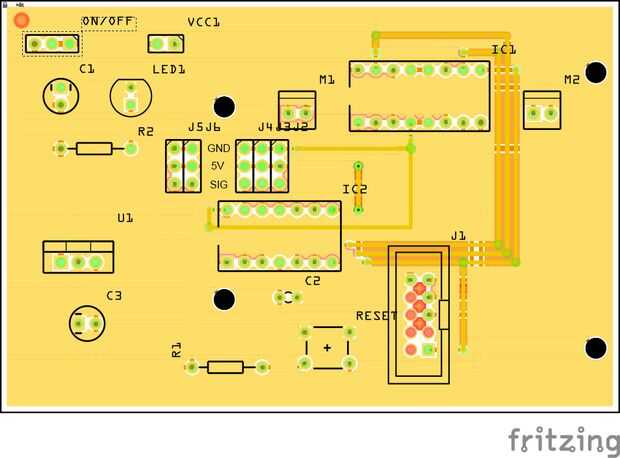
Utilice el tercer cuadro como referencia para colocar los componentes. Puse los conectores para los motores (M1, M2), los sensores (J2, J3, J4) y el programador (J1). Son 2 conectores libres (J5, J6) que pueden utilizarse para un tablero de hija o para depurar. Usé conectores que he encontrado en mi taller. No dude en utilizar lo que tienes o soldar los cables directamente. El conector J6 J2 usar el mismo régimen de pin; el pin cerca el ATTINY es la señal (SIG), el pin en el centro es de 5V y el pin fuera de es tierra (GND). Había soldado los cables con un conector JST para la batería. Dependiendo de la batería que tenga que elegir otro conector.
He creado unos bocetos para depurar la placa madre y asegúrese de los sensores y los motores están trabajando. Encontrará más detalles de cómo utilizarlos en los pasos posteriores. Te aconsejo que primero estos bocetos antes de subir el sketch de ANN. Si los motores funcionan en la dirección equivocada, sólo cambiar sus cables (o cambiar los pines digitales en los bocetos).

")



")







