Paso 3: Electrónica: construcción de los sensores
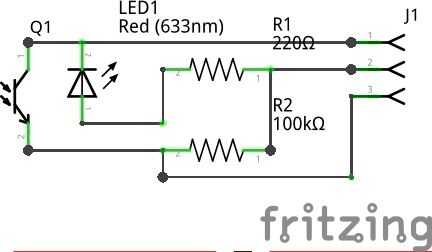
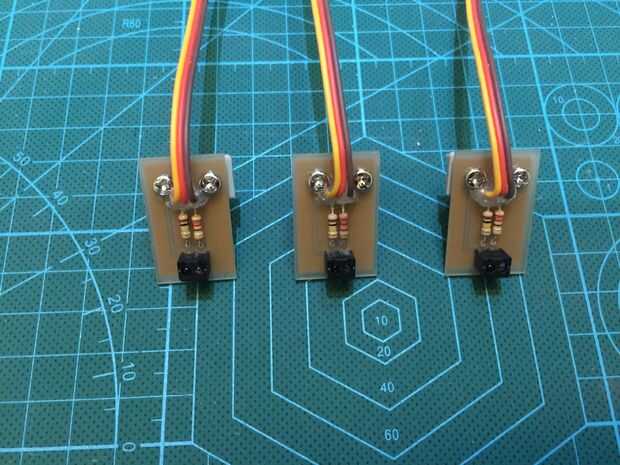
Debe construir 3 de este sensor. El robot utiliza sensores infrarrojos para detectar obstáculos. Básicamente es más cerca los obstáculos, más bajo es el voltaje en los pines del receptor IR. La tensión no es máxima cuando hay ningún obstáculo. Estos sensores se conectará a 3 pines analógicos (A0, A1, A2) de lo ATTINY.
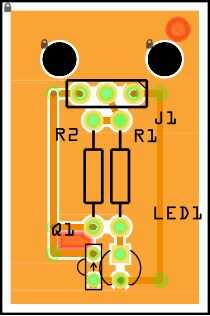
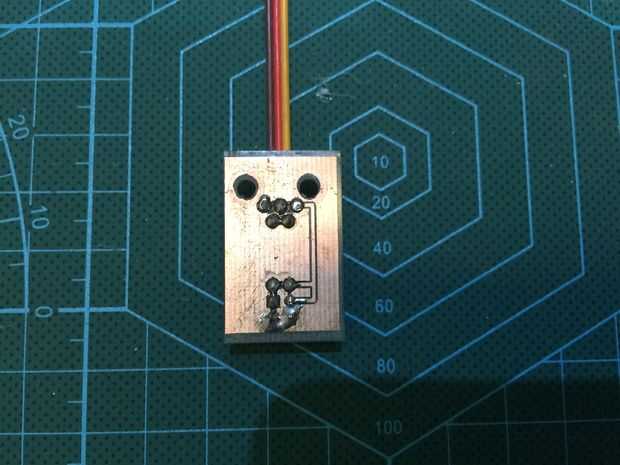
Este sensor es de una sola capa PCB y utiliza el mismo proceso de construcción como la placa base.

")



")







