Paso 2: montaje


Electrónica:
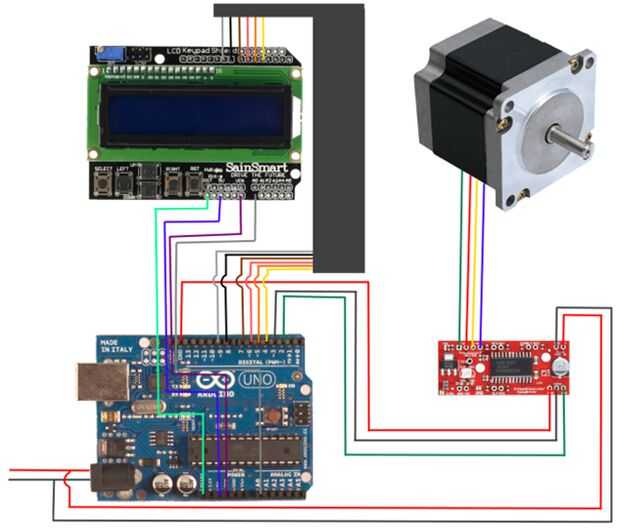
Conecte el steppermotor motorcontroller a Arduino según la imagen de arriba.
Jeringa:
Fije el steppermotor a la jeringa de tal manera que cada rotación mueve la jeringa poco a poco. (ver imagen 2)
cubierta:
Puede hacer la carcasa que quieras. Elegimos para el aluminio con placas acrílicas en los lados.

")








")
")

