Paso 4: Automatización de ToBe - robot clasificador de Color - PLC
Programación de PLC se utiliza para controlar la banda transportadora.
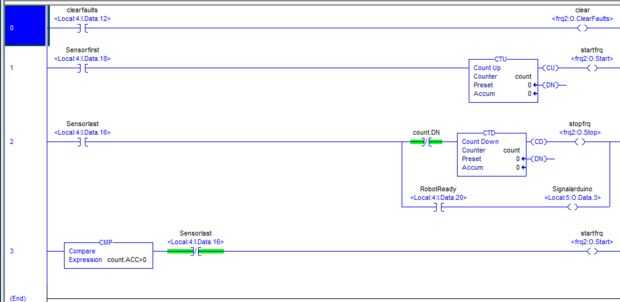
Hay dos sensores, uno en el principio que comienza la cinta transportadora y en el extremo del transportador que detiene el transportador. Con el primer sensor, si hay un objeto inicia también el contador. Con cada objeto dejando la correa, hay un contador hacia abajo. Esto significa que el PLC sabe si existe producto en el transportador, o no. Así sabe si debería comenzar transportador, o no. PLC está recibiendo la señal de arduino, si el brazo del robot se encuentra en estado listo. Significa que está en posición, no hacer nada. Cuando esté listo el PLC enviar la señal a arduino que es objeto en el último sensor de robot puede recogerla. No hay posibilidad de enviar señal de otro objeto, hasta que primero uno no se hace.
Incluido es el programa del PLC, realizado en estudio 5000, probablemente usted tendrá que cambiar el número de I/O




")








