Paso 7: Montaje y programación del controlador



#include < Servo.h > / / incluindo una biblioteca servos dos
Servo SRx;
Servo SRy;
const int VRx = A0;
const int VRy = A1;
int sensorVRx = 0;
int sensorVRy = 0;
int outputVRx = 0;
int outputVRy = 0;
tempo_anterior largo = 0;
largo intervalo = 100; milisegundos
tempo_atual largo sin firmar;
void setup()
{
Serial.Begin(9600);
SRx.attach(9);
SRy.attach(10);
}
void loop()
{
tempo_atual = millis(); / / o tempo atual é igual ao tempo de funcionamento do uC
sensorVRx = analogRead(VRx);
sensorVRy = analogRead(VRy);
outputVRx = mapa (sensorVRx, 0, 1023, 0, 180);
outputVRy = mapa (sensorVRy, 0, 1023, 0, 180);
Si (tempo_atual - tempo_anterior > intervalo) / / se o tempo atual menos o tempo anterior para maior o intervalo com eu quero fazer minha acao
{
tempo_anterior = tempo_atual; //tempo anterior recebe o tempo atual
Serial.Print(outputVRx);
Serial.Print(",");
Serial.Print(outputVRy);
Serial.Print(",");
Serial.println("");
}
SRx.write(outputVRx);
SRy.write(outputVRy);
Delay(2);
}
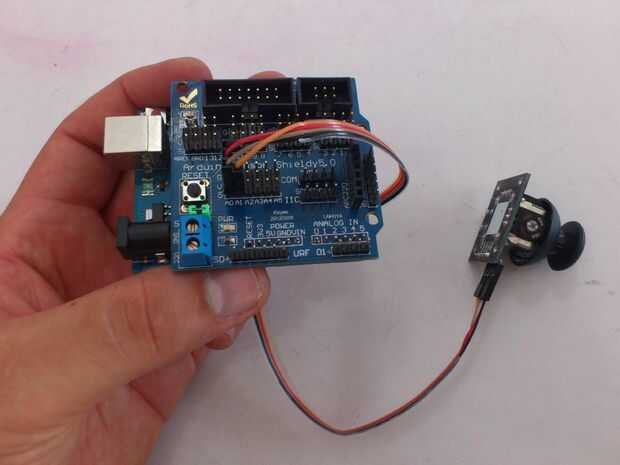
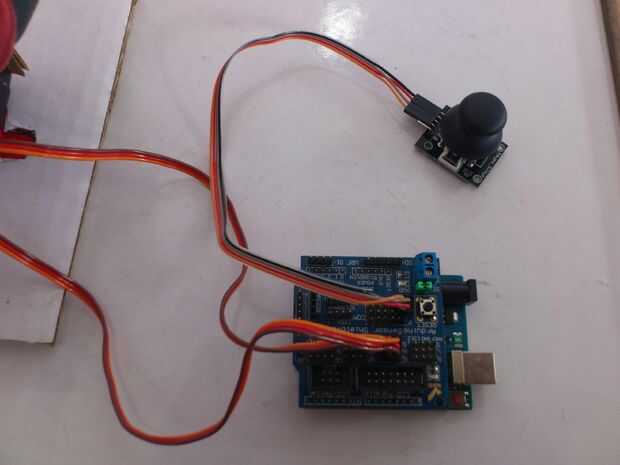
En ejecución:













