

Toma un paso a paso este video de 'How To...' acercarse a la creación y volando misiones simples mediante la aplicación de la estación de tierra Torre ' para dispositivos Android, para incluir: 1. Simple 2 puntos. Waypoints de spline 3. Waypoints de círculo 4. Región de interés (ROI) puntos 5. Libre-dibujo de puntos de referencia, estructura Scanner y 'Dronies' se tratarán en futuros videos.
Este video pretende ser un fácil recordatorio de referencia /. Algunas pantallas pueden cambiar demasiado rápido para ver todos los detalles para que usted tenga que usar 'Pause'. Aquí está el menú:
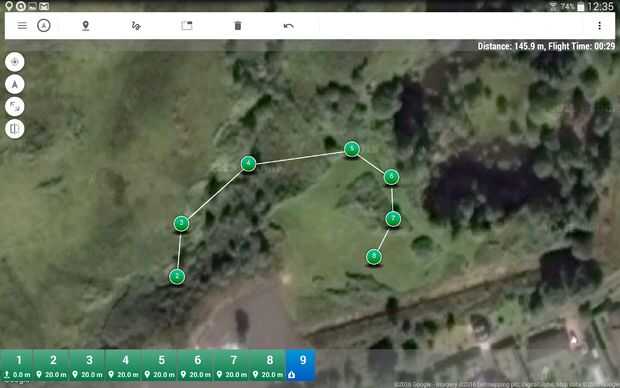
Introducción las 00.00; 00.28 hardware & Software; 01.19 parte 1: Creación de una misión usando Waypoints simple; 02.25 utilizando la herramienta 'draw gratis' para crear a una misión; 04.02 cheques que la misión ha subido a los aviones no tripulados utilizando el planificador de misión; 04.53 vuelo prueba de aplicación de la torre ' a despegue y tierra; 05.49 prueba de vuelo de vuelo de la simple misión de Waypoint; 07.35 parte 2: Creando una misión usando Waypoints de Spline; 09.05 vuelo de prueba de la misión de Waypoint de Spline; 11.02 rápida de comparación de comportamiento de vuelo usando simple y Waypoints de Spline; 11.30 parte 3: Creación de una misión de 'Círculo' waypoint; 12.35 prueba de vuelo de una misión de 'Círculo' Waypoint; 14.43 parte 4: Creación de una misión de 'región de interés (ROI); 15,27 prueba de vuelo de de una misión de retorno de la inversión.
La aplicación de torre 3DR abejón ' es una solución de estación de tierra para APM y Pixhawk controladores de vuelo utilizan dispositivos móviles Android. Misiones de vuelo autónomo se muestra en el video fueron volado y creado usando un custom Aliencopter abeja 470 Cruachan con un controlador de vuelo de APM 2.6 uso de la aplicación de la torre ' solamente.
Por favor nota que cuando toque 'Brazo' y 'Auto' otra confirmación es necesaria con un golpe cruzado el icono que aparece en pantalla. No tomamos imágenes de esta acción.






 - Torre de la energía")





