
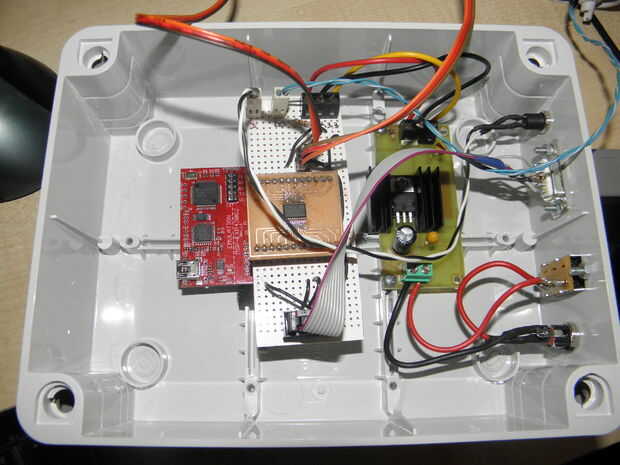

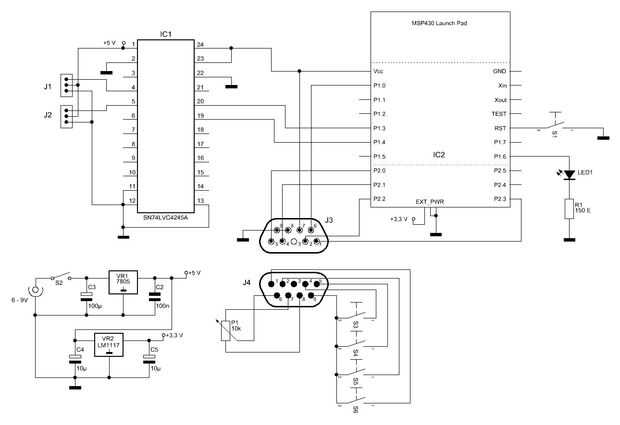
De la placa principal usé MSP430 LaunchPad con microcontrolador MSP430G2553. LaunchPad tienen opción para fuente de alimentación externa (3.3 V). La fuente de alimentación es construir con 7805 y LM1117. Porque servos no trabajan a 3.3 V cuando prueba, uso 5 V para servos. Servos no dio vuelta durante la prueba así que tuve que poner en el desplazador del nivel. Hace un tiempo hice junta con SN74LVC4245a así que utilizado en este proyecto para que el cambio de nivel. Usé el mini joystick y potenciómetro para el control de velocidad de posición y servos.
Torrecilla es de vidrio acrílico. Se atornilla juntos. Cada parte, que no firmemente a la estructura, se pega con pegamento caliente.
Web cam es calidad VGA.
Programa es muy básico. Tenía planes para el control de servos usando Timer A, pero me quede sin tiempo. Programa se hace con IAR Embedded Workbench. Puede obtener su versión gratuita limitada de código en el sitio de IAR. Para programar el microcontrolador, se necesita establecer el dispositivo correcto (MSP$ #= G2553 en este caso), depurador al depurador de FET y optimizaciones en el compilador a medio o alto (tamaño). También necesita establecer configuración de biblioteca para CLIB.













