Paso 6: Flujo de Software
El código está escrito en lenguaje ensamblador de Microchip (mpasm). En lugar de arar a través de detalles sangrientos te voy a dar una suerte más fácil de entender Resumen.
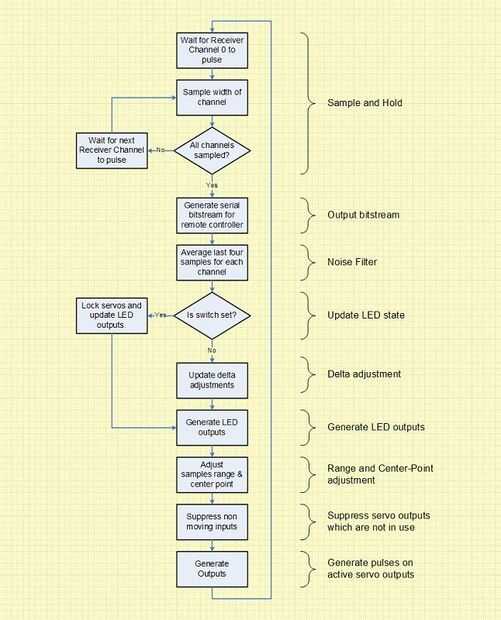
El software de controlador de servo muestras las entradas, un promedio de los últimos para filtrar ruido, realiza ajuste de gama/centro-punto y luego regenera las salidas (opcionalmente supresión de puertos inactivos).
Hay dos variantes del código. La única diferencia real es de dónde provienen las entradas servo. El controlador base muestras directamente del receptor. La torreta muestras un bitstream serial generado por la base.
El mismo código fuente admite dos variantes. Ver define TXCHIP (de base) y RXCHIP (para la versión de torreta).
Varias opciones han asociado la cuenta de temporizador. El código implementa timers por los lazos de 20msec número de seguimiento. Por ejemplo, si una entrada ha estado inactiva durante 32 loops (0,64 seg) se activará el filtro inactivo.













")