Paso 1: BB8 proyecto Arduino UNO


ITESM CEM
Julieta Noemí Rivera Fonseca A00908715
María José López Ponce de León A00967886
Luz Beatriz Velázquez Delgado A01165911
Ilse Silva Vázquez A01165927
Interfaces Físicas
PROYECTO FINAL:
BB-8 TORTUGAS
Definitivamente Star Wars es muy importante para muchas generaciones y ahora estamos viviendo una nueva era de Star Wars el episodio VII y las películas enteras que se ha producido para los próximos años. Para este proyecto hemos querido crear algo con todo el conocimiento que tenemos gracias al curso y por supuesto que queríamos utilizar el tema de Star Wars.
Nuestra fuente de inspiración fueron todos los drawbots que encontramos en Internet, pero también queríamos crear nuestro propio BB-8 inspirado en un tamaño de vida real BB-8 creado con un Arduino, porque seamos honestos, ¿quién no ama BB-8? No cambió la creación original, pero lograr el producto final fue muy satisfactorio.
1. ¿Cómo funciona nuestra tortuga BB-8?
Con la ayuda de dos motores paso a paso hacemos el movimiento de tres ruedas y el sharpie que dibuja en el piso se mueve gracias a un servo que utiliza en el frente de nuestra tortuga BB-8. BB-8 puede dibujar diferentes figuras gracias a las diferentes normas de Arduino nos escribió: un círculo, un triángulo y un mandala.
2. las partes de nuestra tortuga BB-8
• Dos motores paso a paso
• Tres ruedas
• Un Arduino Uno
• Un protoboard
• Una resistencia de 1 ohmio
• Tiras de LED rojo
• Un servo
• Los cables de
• Tabla de madera circular
• Dos domos de poliestireno de diferentes tamaños
• Dos pequeñas bolas de poliestireno de diferentes tamaños
• Un sharpie
• Dos baterías de 9V con ellos adaptadores
• Pintura acrílica (naranja, blanco, negro y gris)
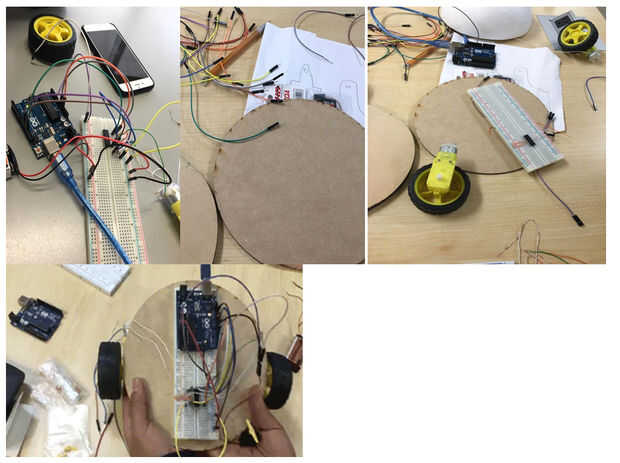
3. cableado todo:
Se realiza la conexión de los LEDs las luces de serie del cable de batería 9 voltios. Y para la conexión del servo se hace con el Pin y la batería.
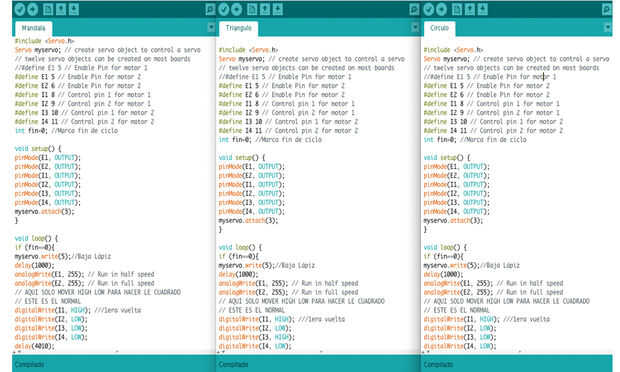
4. Arduino códigos:
• Mandala:
#include
Servo myservo;
#define E1 5
#define E2 6
#define I1 8
#define I2 9
#define I3 10
#define I4 11
int fin = 0
void setup() {}
pinMode (E1, salida);
pinMode (E2, salida);
pinMode (I1, salida);
pinMode (I2, salida);
pinMode (I3, salida);
pinMode (I4, salida);
myservo.Attach(3);
}
void loop() {}
Si (fin == 0) {}
myservo.Write(5);
Delay(1000);
analogWrite (E1, 255);
analogWrite (E2, 255);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(4030);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(4030);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(4030);
fin ++;
}
Else {}
myservo.Write (90); //Sube Lápiz
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
}
}
• Triángulo:
#include
Servo myservo;
#define E1 5
#define E2 6
#define I1 8
#define I2 9
#define I3 10
#define I4 11
int fin = 0
void setup() {}
pinMode (E1, salida);
pinMode (E2, salida);
pinMode (I1, salida);
pinMode (I2, salida);
pinMode (I3, salida);
pinMode (I4, salida);
myservo.Attach(3);
}
void loop() {}
Si (fin == 0) {}
myservo.Write(5);
Delay(1000);
analogWrite (E1, 255);
analogWrite (E2, 255);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(2000);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(1500);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(2000);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(1500);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(2000);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(1500);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, alto);
digitalWrite (I4, LOW);
Delay(2000);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(1500);
fin ++;
} else {}
myservo.Write (90); //Sube Lápiz
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
}
}
• Círculo:
#include
Servo myservo;
#define E1 5
#define E2 6
#define I1 8
#define I2 9
#define I3 10
#define I4 11
int fin = 0
void setup() {}
pinMode (E1, salida);
pinMode (E2, salida);
pinMode (I1, salida);
pinMode (I2, salida);
pinMode (I3, salida);
pinMode (I4, salida);
myservo.Attach(3);
}
void loop() {}
Si (fin == 0) {}
myservo.Write(5);
Delay(1000);
analogWrite (E1, 255);
analogWrite (E2, 255);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(4010);
digitalWrite (I1, alto);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
Delay(2000);
fin ++;
} else {}
myservo.Write (90); //Sube Lápiz
digitalWrite (I1, LOW);
digitalWrite (I2, LOW);
digitalWrite (I3, LOW);
digitalWrite (I4, LOW);
}
}
5. diseño de nuestra tortuga BB-8:
El diseño de nuestro BB-8 fue muy fácil. Usando al droide de BB-8 diseñado por el esfero como base nos pintó los patrones en los domos de poliestireno y poner la pequeña cúpula en la parte superior de un mayor. Después de eso sólo añadir algunos detalles con un rotulador y poner ambos de sus ojos con dos pequeñas bolas de poliestireno y para darle luz para que lo podemos ver en la oscuridad que ponemos alrededor de las tiras de domos el LED. Al final cubrimos la protoboard con todos los cables y el Arduino con la cúpula más grande.
6. Qué hemos aprendido:
No fue fácil, pero nos encanta el resultado final. Entendemos mejor cómo funciona el motor paso a paso y el servo y también cómo dibujar una figura más complicada en el piso, no sólo una simple. Por supuesto hemos tenido momentos difíciles con los cables cuando los LEDS no funcionaba, pero al menos podríamos encontrar cuál era el error y ver como solucionarlo, algo que aprender en el proceso de creación de nuestra propia tortuga BB-8.
7. reflexiones:
Definitivamente trabajamos como un equipo y ayudarnos unos a otros en lo que mejor sabemos, porque como siempre tal vez uno de nosotros es mejor con el cableado o los códigos, o tal vez con el diseño, pero es es importante en un equipo, para ayudarnos unos a otros por lo que podemos lograr lo que estamos buscando. Pensamos que aún podemos trabajar en los códigos para crear figuras más complicadas, pero estamos muy contentos con el producto final de nuestro proyecto final.
8. gif:
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif7_zpscrragk1v.gif
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif3_zpsl5gpxbr7.gif
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif6_zpszyzx4ll5.gif
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif2_zpsp8hxv3ld.gif
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif1_zpsum4wp03j.gif
• http://i1373.photobucket.com/albums/ag397/majolpl90/Gif9_zpslyq27jmo.gif
9. Bibliografía:
ASCAS. (2016). Autodesk, tinta. DIY tamaño natural teléfono controlado BB8 droide. Recuperado el 10 de abril de 2016, de:
Sternchen, C. (2015). YouTube. Carrito controlado por vía bluetooth utilizando arduino uno. Recuperado el 13 de abril de 2016, de: https://www.youtube.com/watch?v=D6n69O2XYO0
Scarmenman. (2016). Autodesk, tinta. Coche de RC de Arduino Bluetooth controlado. Recuperado el 13 de abril de 2016, de:













