Paso 11: Controlador de vuelo


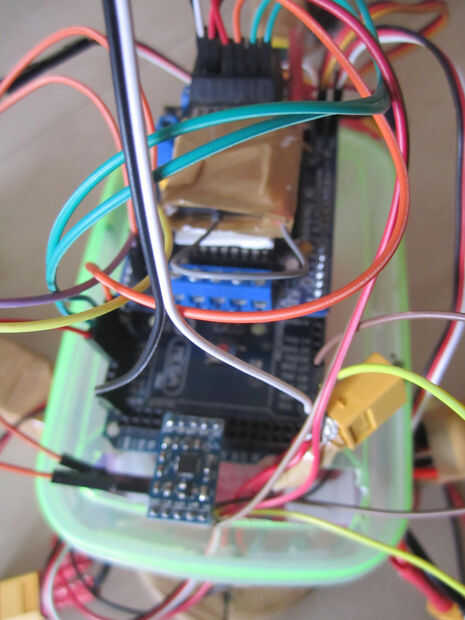
Este es el cerebro de la tricopter.
La que he hecho se basa en multiwii.
Vaya a este sitio web y descargar el software.
una vez que han abierto el sketch de arduino vaya a la pestaña config.h y si usted está usando arduino mega elegir multiwii mega como su controlador de vuelo y descomentar el tri como el multirotor.
Aquí están las conexiones.
también disponible aquí
Parte posterior 3
6 izquierda
5 derecha
2 desvío Servo
Vin en cualquiera de los de esc + ve
toma de tierra para una tierra. de la esc
luego conectar el gnd de los esc a GND. de arduino
el pin de 5v del mpu 6050 a 5v de arduino.
GND a gnd del mpu 6050
SCL a scl de mega
SDA a sda de la mega.
Acelerador de receptor a A8
Rodillo para A9
Paso a A10
Desvío a A11.
Para más detalles acceda al enlace








")



")
