Paso 10: electrónica





El sistema de electrónica para este juego no es realmente tan complejo una vez que se descompone en sistemas separados.
La razón por la que quería hacer el lado izquierdo del lado derecho y todavía operaría botas sistemas separados fue así que se podría ejecutar al mismo tiempo y si un sistema fue el resto del traje.
El lado izquierdo tiene la entrada de etiqueta RFID de dos dedos en la mano izquierda el Arduino funcionará bien las funciones del casco (a través de la radio XBee) o tendrá las vainas cadera y aletas traseras recorren una secuencia programada.
La derecha toma la entrada de etiqueta RFID de dos dedos en la mano derecha y luego un segundo Arduino opera la cadera vainas o cohetes hombro, dependiendo de la etiqueta se lee. Si se seleccionan las vainas cadera el protector de la onda también se activa para jugar un efecto de sonido.
El sensor de infrarrojos en la bota derecha envía una señal a otro Arduino que opera las luces para las botas y se activa el protector de la onda para jugar un efecto de sonido.
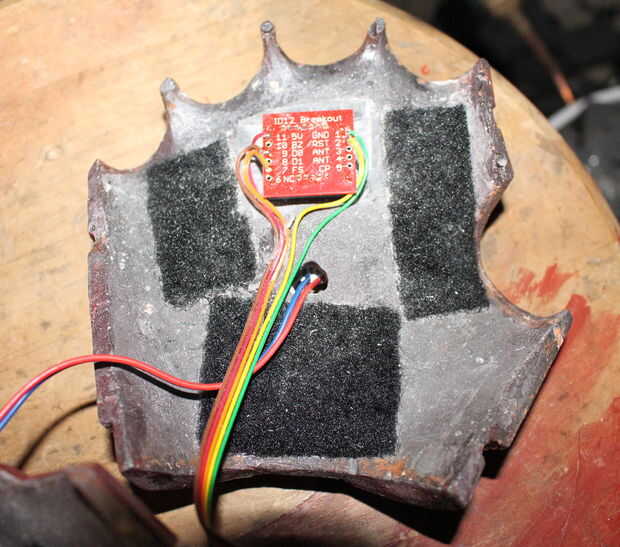
Para probarlos pegué etiquetas RFID y un lector a un guante para obtener una idea de lo fácil que sería hacer funcionar, ya que el lector sólo puede leer una etiqueta en un momento. Lectura de dos etiquetas al mismo tiempo da cero salida. Yo estaba preocupado de que puesto que los dedos estaban en proximidad cercana a uno con el otro esto podría ser un problema, pero resulta que ha funcionado muy bien.
El lector entonces fue montado en el interior de la cáscara de guante del traje de fibra de vidrio utilizando cinta adhesiva de la espuma. La parte posterior del tablero fue grabada luego más para proteger y los cables. Las cáscaras de guante ajuste sobre un guante de béisbol para que la mano de la persona nunca entra en contacto con la Junta. Los guantes tienen cables de extensión que se conectan a los guanteletes, que tienen conectores Ethernet para conectar a los cables de Ethernet que se ejecutan a través de los brazos. El guante izquierdo es prácticamente vacío mientras que el guante derecho tiene portapilas AA así como un tablero pequeño conector para los cables de servo.
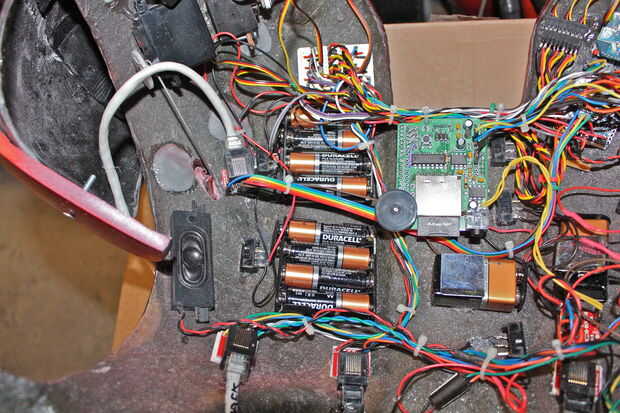
Los tres Minis Pro de Arduino están montados en la parte posterior de la sección de la parte superior del torso junto con las baterías y los interruptores para cada sistema. Los interruptores de alimentación indicados en la sección de materiales son clasificados a 4 amperios, que deberían ser suficiente para la corriente de los servos diferentes. He utilizado transistores TIP 120 en los circuitos, porque siempre me parece que les tienen a la mano-usted puede utilizar cualquier transistor de conmutación que desea como puede manejar el LED actual dibuja en los diferentes circuitos.
El protector de la onda se sienta encima del Arduino Pro en el centro y el radio XBee que transmite para el casco es visible en la parte superior. También hay varios conectores Ethernet visible y dos para los brazos, dos para las piernas y uno para el cable Ethernet que va a la sección de cadera. También es visible un tablero que tiene unos transistores en él-estos toman las señales de los Arduinos y encender las luces de arranque y activan los efectos de sonido a través del protector de la onda. La salida del protector de la onda es impulsada por una (opcional) placa de pequeño amplificador. Hay una pequeña placa PCB en la esquina superior que dispone de conectores de los servos de cohete de hombro y servos de aleta trasera. Los dos oradores fueron rescatados de un viejo monitor.
Los tableros se fijan con cinta de la espuma como lo sostiene firmemente, pero todavía se pueden quitar y si los cables Haz tirados nada se dañe. Los cables Ethernet también fueron asegurados con pegamento caliente un poco de los conectores con el fin de proporcionar cierto alivio de tensión.
Si iba a hacerlo otra vez yo probablemente crearía una sola junta hacia abajo en el centro y han los Arduinos socketed junto con un tablero con transistor usando transistores SMD. También tengo los conectores de servo de la Junta de centro. Contribuiría un registro hacia la limpieza de los cables.
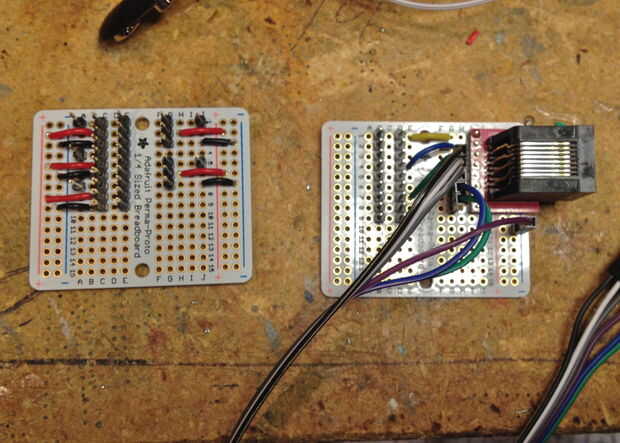
La sección de cadera pod utiliza una pequeña placa PCB con un conector Ethernet para rutear las señales para los servos y LEDs en las vainas. Hay un tablero pequeño transistor que se utiliza para encender el pod LEDs. Los cables de los LEDs se ejecutan a través de la parte posterior de las vainas cerca de la bisagra y tubo termo retráctil se utiliza proteger los cables contra posibles daños causados por el movimiento de bisagra.
Finalmente las baterías AA que proporcionan energía a los servos de cadera pod fueron montadas en el interior de la sección del pecho cerca del pecho junto con un interruptor de luz. Un cable con un conector JST fue dirigido a la sección de cadera pod.
Mucho para mi sorpresa, todo funcionaba en realidad la primera vez que enciende (aunque había breadboarded los circuitos para las pruebas.) Lo único que tenía que hacer era realizar ajustes en tiempo y movimientos de servo en el código.










")
")
