Paso 13: Electrónica-wireless casco esquemático y código
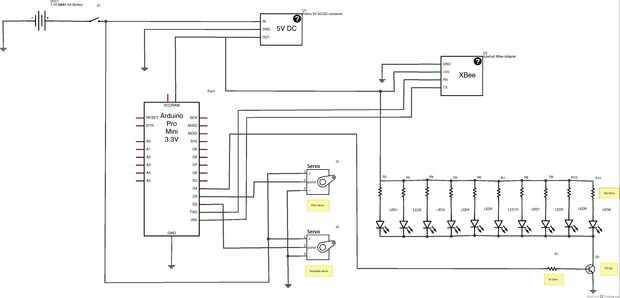
Aquí está el esquema y el código para el casco inalámbrico.
Ya que hay muy poco espacio en el casco el sistema inalámbrico estaba propulsado por un único 7.4V batería NiMH. Los servos digitales utilizados en el casco están diseñados para funcionar con 7.4V por lo que se utiliza un convertidor de DC/DC de 5V para alimentar el Arduino, XBee y LEDs.
Aquí está el código-
#include "Servo.h" / / incluye la librería servo
Servo faceplateServo;
Servo chinServo;
ledPin1 int = 4; pin de control de LED ojos
int servoPin1 = 2; pin de control de servo de la placa de cara
int servoPin2 = 3; pin de control de la barbilla
void setup() {}
faceplateServo.attach(servoPin1); se fija el servo en el pin 2 al objeto servo
chinServo.attach(servoPin2); se fija el servo en el pin 3 al objeto servo
faceplateServo.write(30); servo de placa cara gire a 30 grados
chinServo.write(95); servo rotación mentón a 95 grados
pinMode (ledPin1, salida); establece el pin LED como salida
digitalWrite (ledPin1, HIGH); encender LED ojos
Serial.Begin(9600);
}
void loop() {}
buscar una A mayúscula sobre el puerto serie y apague el LED
Si (Serial.available() > 0) {}
Si (Serial.read() == 'A') {/ / lee la etiqueta sobre XBee
digitalWrite (ledPin1, LOW); Apagar LED ojos
Delay(500); esperar medio segundo
faceplateServo.write(95); girar el servo de la placa de cara a 95 grados
chinServo.write(20); girar el servo de la barbilla a 20 grados
Delay(4000); Espere 4 segundos
chinServo.write(95); girar el servo de la barbilla a 95 grados
faceplateServo.write(30); girar el servo de la placa de cara a los 30 grados
digitalWrite (ledPin1, HIGH); encender LED ojos
}
}
}










")
")
