Paso 4: Casco inalámbrico




































El primer elemento en la lista estaba haciendo el casco abierto.
Ingeniárselas trabajar el casco fue bastante complicado. Definitivamente queríamos que sea inalámbrico por lo que se puede fácilmente sacar pero hay apenas cualquier habitación en el casco para servos, y mucho menos electrónica. Cuando Greg me trajo el casco tenía pistas ya moldeadas en la parte superior por dos pequeños enlaces pivotantes que se adjunta a la parte superior de la placa frontal. La placa frontal tenía dos brazos pivotantes que le permitía a levante y deslice hacia atrás. El primer sistema que instalé para motorizar el casco utiliza dos servos mini digital idéntica alta tensión con un sistema de varilla que mueve la placa frontal y mentón al mismo tiempo. Como los servos tiraron las barras de los brazos levantados la placa frontal y una segunda barra pivotante abre la carrillera. Aunque este sistema funcionaba bien se fue finalmente desechado porque tenía demasiado espacio alrededor de los lados del casco, especialmente en el área del templo donde se encontraban los pivotes del brazo.
Aquí hay un video de la primera prueba del casco. Se puede ver el lector de RFID y radio XBee en un protoboard prueba circuito al principio del video-
El sistema revisado funciona un poco diferente y es mucho más simple. Alteré el sistema original de casco, cambiando de un sistema pivot link multi a un sistema de pivote de tres simple. Los brazos que levantar la placa frontal se eliminaron como fueron sus cuatro pivotes. Las pistas en la parte superior del casco se mantuvieron pero los enlaces tenían una tendencia a enlazar como gira para que los enlaces fueron reconstruidos desde cero como puntos fijos y ajustaron a la parte superior de la placa frontal de casco con masilla de epoxi de ProPoxy 20 en una posición fija.
El mecanismo de servo fue cambiado para que un mini servo abriría la placa frontal mientras otro abría la barbilla, que abrirían camino que la sincronización podría ser cambiada por lo que la placa frontal abriría primero y luego la barbilla. Al cerrar el casco la barbilla cerraría primero, luego la placa frontal. El servo de la placa frontal tiene un brazo de latón que es plata soldada a una bisagra que es fiberglassed en la sección central superior del casco. La placa que se suelda al tubo de la bisagra se extiende hacia atrás maneras para apoyar la sección del casco, ya que de lo contrario sería demasiado flexy para funcionar correctamente. Tanto de los servos se unen al casco mediante Velcro de alta resistencia.
El servo de chin fue intercambiado hacia fuera para un micro servo y empuja una varilla roscada de 4-40 que se abre el barbilla sección-que es un arreglo muy simple. Finalmente el servo de la barbilla se trasladó más cerca al centro de la barbilla para hacer más espacio para uno de los paquetes de baterías.
Aquí está el video de lo animatronics de casco revisado. Nota la eliminación de las armas necesarias para levantar la placa frontal-
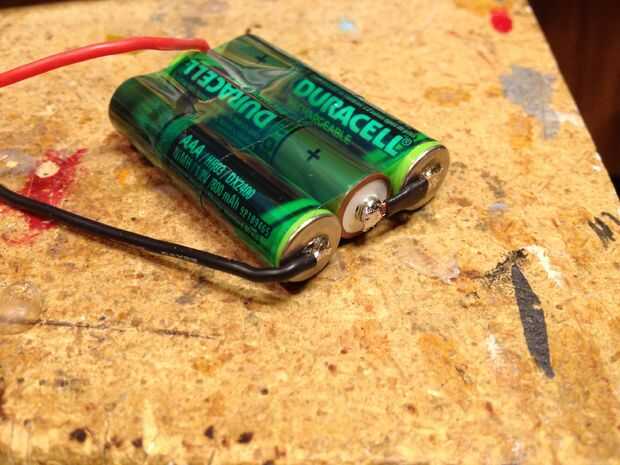
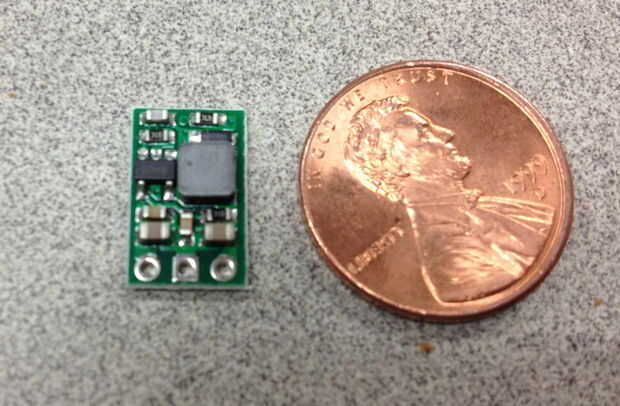
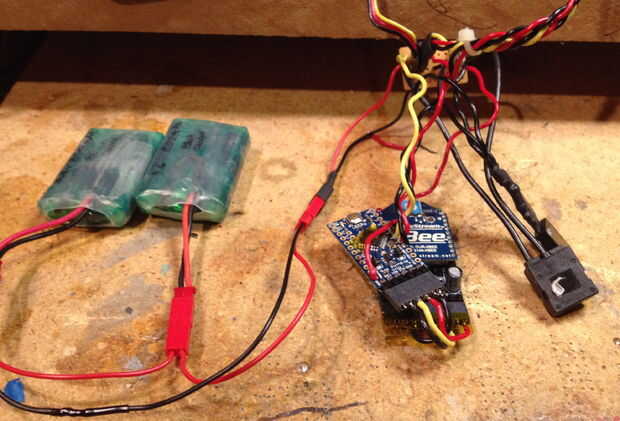
En el lado de la electrónica, un paquete de baterías de split fue construido usando seis células de NiMH AAA para un total de 7.4V para alimentar los servos digitales de alto voltaje. Originalmente habíamos planeado sobre el uso de paquetes de LiPo pero sentía que las células de NiMH sería mucho más seguras y menos problemas en cuanto a la batería de gestión-ver la sección de preguntas frecuentes para obtener más información. Las dos baterías fueron cableadas hasta un Arduino ProMini (3.3V versión) junto con un radio XBee. Poder de la ProMini fue caminado hasta 5V usando un convertidor DC/DC de Pololu. La electrónica se cubrieron con termocontraíbles para protección. Utilizo un Hitec X 1 cargador de MF para el casco de carga de baterías.
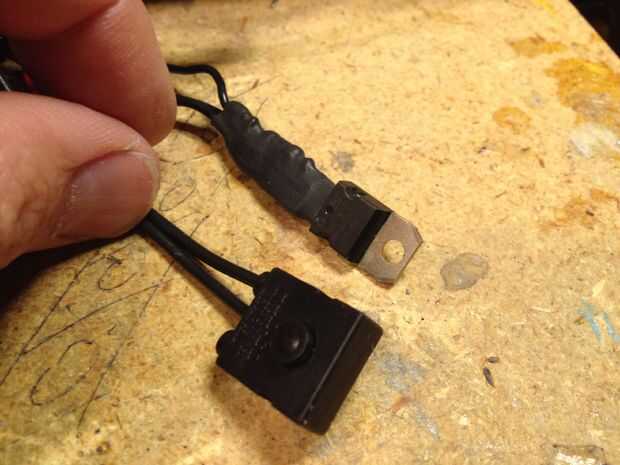
Un sellado pulsador interruptor fue agregado junto con un transistor para encender las luces de LED para los ojos. Los ojos fueron construidos usando LEDs blancos de SMT (cualquier pequeño LED funcionará) con material de la jarra de leche para las lentes. Las lentes tienen una hendidura en la parte superior para que el usuario puede ver hacia fuera y hoja de la espuma negro fue utilizada para bloquear la luz en el interior del casco.
Finalmente todos los componentes electrónicos fueron asegurados en la barbilla del casco. Todo apenas cabe allí sin poder ser visto cuando el casco está abierto. En general que estamos muy contentos con cómo resultó el casco. Se abre muy rápidamente y muy fácilmente podemos cambiar la velocidad de los servos con la sincronización de la secuencia de apertura y cierre.
Ahora la pregunta es: "¿Qué pasa si mi casco no tiene pistas de moldeado en la parte superior del casco"?
Si tienes un casco de Iron Man desde un kit o hecho moldeado mediante el método de pepakura que puede Agregar pistas. Otro amigo mío tenía un casco de MkIV que quería animar como un pedazo de pantalla. He utilizado el mismo sistema mecánico como casco de MkIII de Greg pero el MkIV no tenía pistas moldeadas en la parte superior del casco, así que agregó. Lo primero que hice fue tomar un pequeño redondo barras de plástico y cubrir con una capa fina de vaselina-esto es muy importante! La vaselina actúa como un lanzamiento del molde por lo que puede quitar las varillas más adelante. Las barras fueron colocadas en la parte inferior del casco donde las pistas eran ser él encuentra es importante que las pistas tan paralelo como sea posible o los enlaces se unirán como la placa frontal se abre.
A continuación mezclan algunos masilla de epoxy del ProPoxy 20 y había construido sobre las varillas de plástico. Una vez que la masilla de epoxy curado puso algún paño ligero de fibra de vidrio en la parte superior con alguna resina de epoxi. La tela de fibra de vidrio reforzará la masilla epoxi y asegúrese de que no debond desde la parte inferior del casco. Luego quitar las varillas de plástico y corte las ranuras en la parte superior del casco, para que las guías de acoplamiento de bola podrían deslizar en las ranuras. Las ranuras en la parte superior del casco deben ser más angostas que las ranuras moldeadas para que el enlace de bola no sale como las diapositivas de la placa frontal hacia atrás.
Plata que había suelda los enlaces de la bola que se adhieren a la parte superior de la placa frontal, pero hay otra opción más simple. Puede comprar bolas de nylon en todos los tamaños diferentes - taladro un agujero a través de la bola y coloque un extremo de la varilla en forma de "L" aplanando ligeramente la varilla (esto ayudará a mantener la bola en la varilla) y poner una gota de pegamento para fijarlo.
Una cosa que me pareció muy útil fue unir mis Cañas a la placa frontal con pegamento (uso un acelerador spray - bicarbonato también funciona) y deslice la parte posterior de la placa frontal para asegurarse de que tiene un movimiento suave. Una vez que el posicionamiento derecha utilizar la masilla de epoxy para fijar.










")
")
