Paso 3: Software

Software.
El firmware del microcontrolador ha sido desarrollado en lenguaje C usando el fabricante IDE (AVR Studio) y compilado con el compilador GCC. El protocolo de comunicaciones entre transceptores ha sido hecho, pero actualmente se basa en ASCII estándar. Decidimos hacerlo de esta forma por lo que podríamos hacer más investigación sobre cifrado y compresión de datos. El cambio más reciente ha sido aplicar una suma de comprobación del sistema para verificar la integridad de los datos
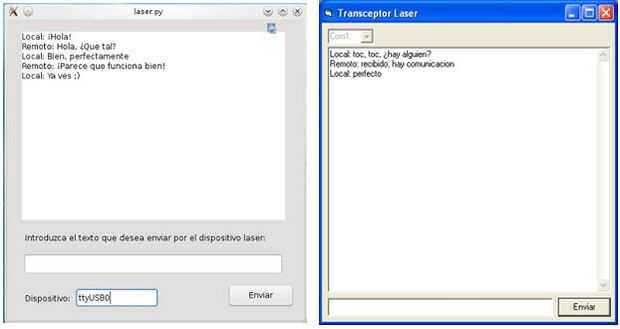
Desarrollamos el software de comunicaciones entre el ordenador y el transceptor para Linux (Python + GTK) y Windows (Visual Studio).
¿Too mucho trabajo?... no te preocupes.
Si usa Arduino, Pinguino o cualquier otro tablero usted puede hacerlo fácil simplemente conectando el láser y el receptor a las patas de TxRx (duro o suave configuradas).
El software de la PC puede ser cualquier software de comunicaciones como el hyperterminal o la misma utilidad del IDE de Arduino.

 del registro")
 la fuente de alimentación del láser de CO2 para obtener larga vida útil de su tubo del Laser del CO2 para sistema de máquina de corte láser y grabado láser")









")
