Paso 6: Motor.
Porque los motores paso a paso de rotación completa no tienen un potenciómetro construido en y así no pueden obtener alimentación de donde parar, tienes que mencionarlo en tu código para dirigir el motor. 90 es un predeterminado punto de partida para la mayoría de los casos, por lo que cualquier número por debajo de los 90 hará que el motor para girar una forma y por encima de 90 hará que gire al revés.
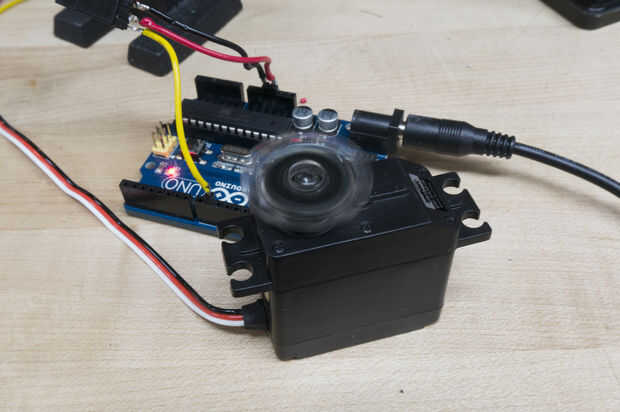
El motor está conectado a un Arduino, y se utiliza un código de barra simple:
#include < Servo.h >
Servo myservo; crear objeto servo para controlar un servo
int pos = 0; variable para almacenar la posición del servo
void setup()
{
myservo.Attach(9); se fija el servo en el pin 9 al objeto servo
}
void loop()
{
myservo.Write(0); Gire a 0
Delay(3000);
myservo.Write(180); girar 180
Delay(3000);
}
Comprobar si el motor funciona con el Arduino.










 cupcakes araña calabaza")


