Paso 3: Explicando el programa de prueba de Arduino
Hoja de datos de mientras que el TX2/RX2 IC se refiere a la función de pasadores en términos de direcciones, por ejemplo, izquierda, derecha, adelante y atrás pins, usar esta Convención de nomenclatura para la consistencia. Pero en realidad, usted decide lo que las funciones deben ser nombradas o lo que hacen porque todo lo que estamos haciendo es pines del IC de activación y desactivación de los. Qué los pines depende de lo que queremos que hacer
En primer lugar, yo asignar e inicializar 4 pines digitales de Arduino para apoyar los 4 pernos de función/sentido en la TX2 quiero transmitir de. El esquema de numeración en el TX2Pin01, TX2Pin14, TX2Pin05, TX2Pin04 corresponden a los pines de la función en el codificador de TX2 IC queremos controlar. Esto es nuevo para la consistencia con la hoja de datos IC TX2. En este proyecto, sólo controlo derecha e izquierda o TX2 patillas 1 y 14 respectivamente.
//===========================================
int TX2Pin01 = 8; Derecho (o lo que quieras este pin no. Lo mismo para otros pernos abajo.)
int TX2Pin14 = 9; Izquierda
int TX2Pin05 = 10; Hacia adelante
int TX2Pin04 = 11; Hacia atrás
void setup() {}
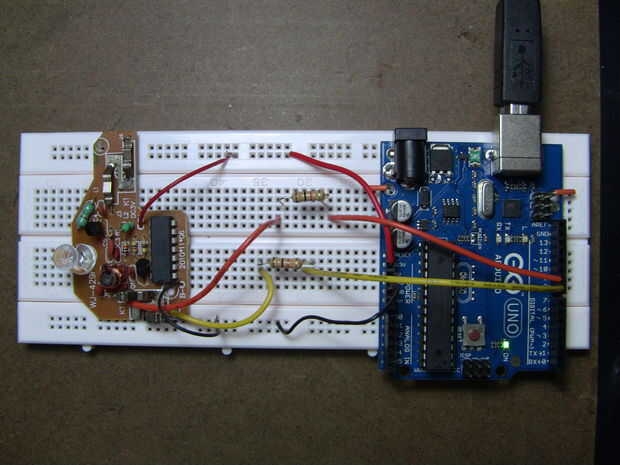
Los 4 pines digitales del Arduino deben conectarse a los pines de función IC TX2 1,14,4,5 vía resistor de 10K ohmios.
El GND de la TX2 es conectado al pin de tierra de Arduino Uno.
La VDD TX2 es conectada al pin de V3.3 de Arduino Uno.
Establezca el 4 pines digitales del Arduino a la salida ya que vamos a usar para el control de la TX2.
pinMode (TX2Pin01, salida); Derecho
pinMode (TX2Pin14, salida); Izquierda
pinMode (TX2Pin05, salida); Hacia adelante
pinMode (TX2Pin04, salida); Hacia atrás
/*
IMPORTANTE: Desactivar todos los pines función/dirección TX2 estableciendo los en alto antes de empezar. Esto es para evitar la activación accidental de izquierda y derecha al mismo tiempo (o delantero y trasero al mismo tiempo) que se confunde el RX2 en el lado receptor.
Cada pin de función/dirección TX2 es activado/activado poniendo a tierra baja.
Una vez más, por favor recuerde que enfrente de direcciones y funciones son mutuamente excluyentes. Decir, no podemos tener tanto derecha como izquierda establece como LOW(GND) al mismo tiempo ya baja enciende ambos pernos de la función. Por la misma razón, no podemos fijamos hacia adelante y hacia atrás como LOW(GND) ya que baja convierte la función de pasadores en. Un motor no puede girar hacia delante y hacia atrás al mismo tiempo. Lo siento si como un disco rayado, pero esto puede ser confuso para algunos
*/
digitalWrite (TX2Pin01, alto); configurar pin TX2 1 a (derecha)
digitalWrite (TX2Pin14, alto); configurar pin TX2 14 (izquierda)
digitalWrite (TX2Pin05, alto); configurar pin TX2 5 en (adelante)
digitalWrite (TX2Pin04, alto); configurar pin TX2 4 en (atrás)
Serial.Begin(9600); para la depuración
}
void loop() {}
/ * Podemos cortar y pegar debajo de código y cambiar variables TX2pinXX control restante 2 pins de función para adelante y la espalda.
El siguiente segmento de código activa derecha/TX2 pin01 función durante 2 segundos que se detiene derecho/TX2 pin01 durante 2 segundos.
*/
Serial.println ("TX2Pin01, bajo/GND/GO justo"); Serial.println ("TX2Pin01, alto/STOP");
digitalWrite (TX2Pin01, bajo); TX2 en convertir el pin 1 (ir a la derecha)
Delay(2000); Espere un tiempo
digitalWrite (TX2Pin01, alto); Apagar pin TX2 1 (parada a la derecha)
Delay(2000); Espere un tiempo
Este segmentos de código activan izquierda/TX2 pin 14 función durante 2 segundos de parada izquierda/TX2 pin14 durante 2 segundos.
Serial.println ("TX2Pin14, bajo/GND/GO de izquierda"); Serial.println ("TX2Pin14, alto/STOP");
digitalWrite (TX2Pin14, bajo); Gire a ON TX2 pin 14 (ir a la izquierda)
Delay(2000); Espere un tiempo
digitalWrite (TX2Pin14, alto); Apagar pin TX2 14 (parada a la izquierda)
Delay(2000); Espere un tiempo
}













")